









Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Description
- OpenMV Cam RT1062 with Machine Vision Capabilities
- Comes with a removable camera module system for interfacing with different sensors
- Programmed using high-level Python scripts for easy handling of complex outputs
- Equipped with an RT1062 ARM Cortex M7 processor operating at 600 MHz
- Features a high-speed USB-C interface and a μSD Card socket for fast data transfer
The OpenMV Cam RT1062 is a compact, energy-efficient microcontroller board designed to facilitate the implementation of real-world applications using machine vision. The board is programmed using high-level Python scripts, courtesy of the MicroPython Operating System, as opposed to C++. This approach simplifies the handling of complex outputs from machine vision algorithms and the manipulation of high-level data structures. Despite this, the board allows for complete control over the OpenMV Cam and its I/O pins in Python, enabling the triggering of picture-taking and video recording on external events or the execution of machine vision algorithms to determine how to control the I/O pins.
The OpenMV Cam RT1062 is equipped with an RT1062 ARM Cortex M7 processor that operates at 600 MHz with 32MBs SDRAM + 1MB of SRAM and 16 MB of program/storage flash. All I/O pins output 3.3V and are 3.3V tolerant. The board also features a high-speed USB-C (480Mbs) interface to your computer, making the OpenMV Cam appear as a Virtual COM Port and a USB Flash Drive when connected.

The board includes a μSD Card socket capable of 25MB/s reads/writes, which allows the OpenMV Cam to take pictures and easily extract machine vision assets from the μSD card. It also has an SPI bus that can run up to 60Mb/s, enabling easy streaming of image data off the system to either the LCD Shield or another microcontroller. The board also features an I2C Bus (up to 1Mb/s), a CAN Bus (up to 1Mb/s), and an Asynchronous Serial Bus (TX/RX, up to 20Mb/s) for interfacing with other microcontrollers and sensors.
The OpenMV Cam RT1062 is equipped with a 12-bit ADC (3.3V Tolerant), three I/O pins for servo control, and one I/O pin for frame sync/triggering (or servo control). It also features an onboard RTC which continues to run when the system is in low-power mode. The board also includes one I/O pin for low power wakeup, a pin for device power button ON/OFF support, and interrupts on all I/O pins.
The OpenMV Cam RT1062 is equipped with a user-controllable/dimmable RGB LED, another RGB LED for Charging, USB Power, VIN Power indication, and 32 MB of external 16-bit SDRAM clocked at 160 MHz for 320 MB/s of bandwidth. It also includes 16 MB of program/storage quadspi flash clocked at 133 MHz in 4-bit SDR mode for 66 MB/s of bandwidth (read speed), and a 12-bit X/Y/Z accelerometer (2/4/8g) centered underneath the camera module.
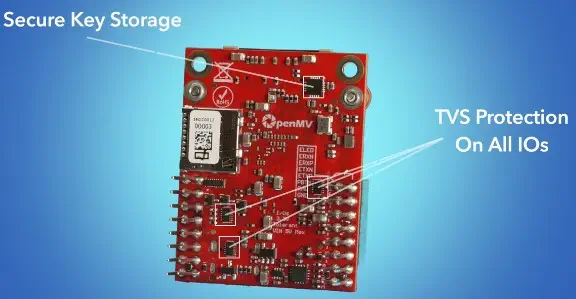
The board also features onboard WiFi (a/b/g/n - 11/54/65 Mb/s) and Bluetooth (v5.1 - BR/EDR/BLE) module with a chip antenna, an onboard 10/100 Mb/s Ethernet Jack with PoE support via an external shield, and Strong Cryptographic Authentication Secure Element support via the SE050C1HQ1. The OpenMV Cam RT1062 also comes with a removable camera module system allowing it to interface with different sensors.
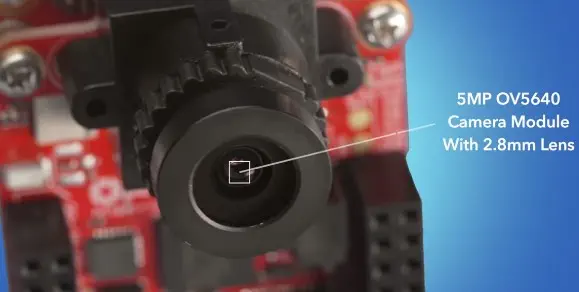
The OpenMV Cam RT1062 is equipped with an OV5640 image sensor capable of taking 2592x1944 (5MP) images. Most simple algorithms will run at about 40 FPS on QVGA (320x240) resolutions and below. The board also includes a LiPo battery connector compatible with 3.7V LiPo batteries commonly sold for hobbyist robotic applications with battery charging support via USB, and an ARM 10-pin JTAG Header Compatible with SEGGER J-Link Devices for debugging and programming. It also features an external 5V VIN with reverse supply protection.
All pins are 3.3V tolerant with 3.3V output. All pins can sink or source up to 4mA. VIN may be between 3.6V and 5V. Do not draw more than 250mA from the OpenMV Cam's 3.3V rail.
- 1x OpenMV Cam RT1062
- 45 x 36 x 29 mm (L x W x H)
- Processor: ARM 32-bit Cortex-M7 CPU with Double Precision FPU, 600 MHz (1284 DMIPS) Core Mark Score: 3020 (compare with Raspberry Pi 3: 3800)
- RAM Layout (33MB Total):
- 32KB Stack
- 480 KB DATA/.BSS/Heap/DMA
- 32MB Frame Buffer/Stack
- 512KB SDRAM Cache
- Flash Layout (4MB Total):
- 256KB Bootloader
- 3.768MB Firmware
- 4MB Embedded Flash Drive
- Supported Image Formats: Grayscale, RGB565, JPEG (and BAYER/YUV422)
- Maximum Supported Resolutions:
- Grayscale: 2952 x 1944 (5MP) and under
- RGB565: 2952 x 1944 (5MP) and under
- Grayscale JPEG: 2952 x 1944 (5MP) and under
- RGB565 JPEG: 2952 x 1944 (5MP) and under
- Lens Info:
- Focal Length: 2.8 mm
- Aperture: F2.0
- Format: 1/3
- HFOV = 70.8°, VFOV = 55.6°
- Mount: M12x0.5
- IR Cut Filter: 650nm (removable)
- Electrical Info:
- All pins are 3.3V tolerant with 3.3V output
- All pins can sink or source up to 4mA
- VIN may be between 3.6V and 5V
- Do not draw more than 250mA from your OpenMV Cam's 3.3V rail
- Power Consumption Schematics & Datasheets
- Altium Design Pinout