
Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Description
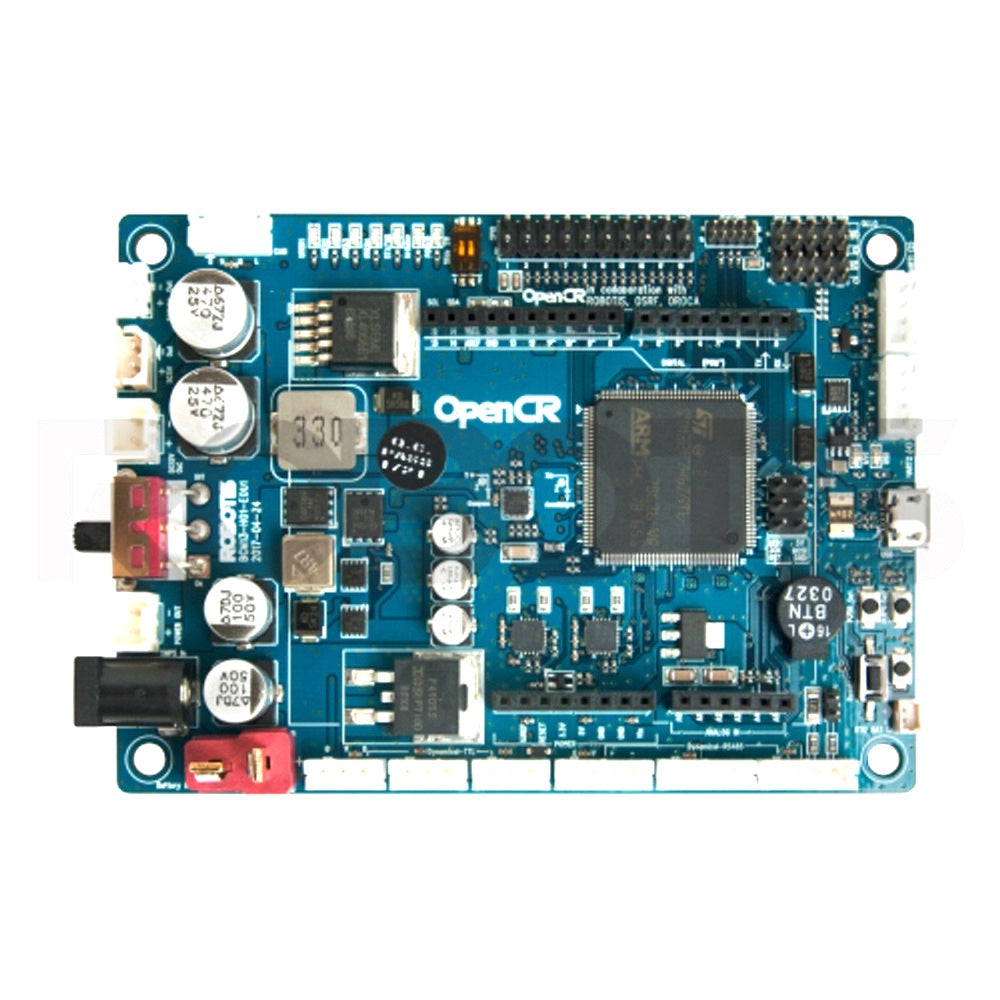
- 1x ROBOTIS OpenCR1.0 Open Source ROS Controller for DYNAMIXEL
- 1x USB Micro B Cable
Size
- 105 x 75 mm (W x D)
- Mass: 60g
- Microcontroller
- STM32F746ZGT6 / 32-bit ARM Cortex®-M7 with FPU (216MHz, 462DMIPS)
- Sensors
- Gyroscope 3Axis, Accelerometer 3Axis, Magnetometer 3Axis (MPU9250)
- Programmer
- ARM Cortex 10pin JTAG/SWD connector
- USB Device Firmware Upgrade (DFU)
- Serial
- Extension pins
- 32 pins (L 14, R 18) *Arduino connectivity
- Sensor module x 4 pins
- Extension connector x 18 pins
- Communication circuits
- USB (Micro-B USB connector/USB 2.0/Host/Peripheral/OTG)
- TTL (B3B-EH-A / Dynamixel)
- RS485 (B4B-EH-A / Dynamixel)
- UART x 2 (20010WS-04)
- CAN (20010WS-04)
- LEDs and buttons
- LD2 (red/green) : USB communication
- 4x User LED: LD3 (Red), LD4 (Green), LD5 (Blue)
- 2x User button
- Powers
- External input source
- 5 V (USB VBUS), 5-24 V (Battery or SMPS)
- Default battery : LI-PO 11.1V 1,800 mAh 19.98 Wh
- Default SMPS : 12 V 5 A
- External output source
- 12V@1A(SMW250-02), 5V@4A(5267-02A),
- 3.3V@800mA(20010WS-02)
- External battery Port for RTC (Real Time Clock) (Molex 53047-0210)
- Power LED: LD1 (Red, 3.3 V Power On)
- Reset button x 1 (For power reset of board)
- Power on/off switch x 1