

Tesla Bot Feasibility

Tesla Bot, code name “Optimus”
On August 19, 2021, Elon Musk announced that Tesla would be creating a humanoid robot within around a year. From a technical standpoint, just how feasible is this? Is a robot with these specs possible given today’s technology? How much of their automotive technology will be reused? Will they share the same materials and electronics? Can Tesla address the knowledge transfer needed between other parts of the company (battery research, materials research, AI) and overcome red tape? This post goes into what might be used to create such a robot and the current state of each technology. Why don’t we have capable humanoid robots yet? There are quite a few obstacles with the current state of robotics and the more important ones include:
Actuators: The best motor would be one which can produce a lot of rotational torque or linear force, doesn’t weigh much and doesn’t consume much energy.
Battery: The holy grail of batteries is one which can store a lot of energy but does not weigh a lot.
Brains / Programming: how the robot will move, walk, understand and interact with its environment (including living creatures) and “think” is very important. We’ll include the walking gait within this obstacle
Sensors: How the robot knows about its environment and itself. Do we try to replicate human senses or integrate entirely new ones?
Materials: The entire robot itself can’t be a giant, bulky and heavy “mech” if it will be accepted into society, and affects physical characteristics like inertia.
Major Players
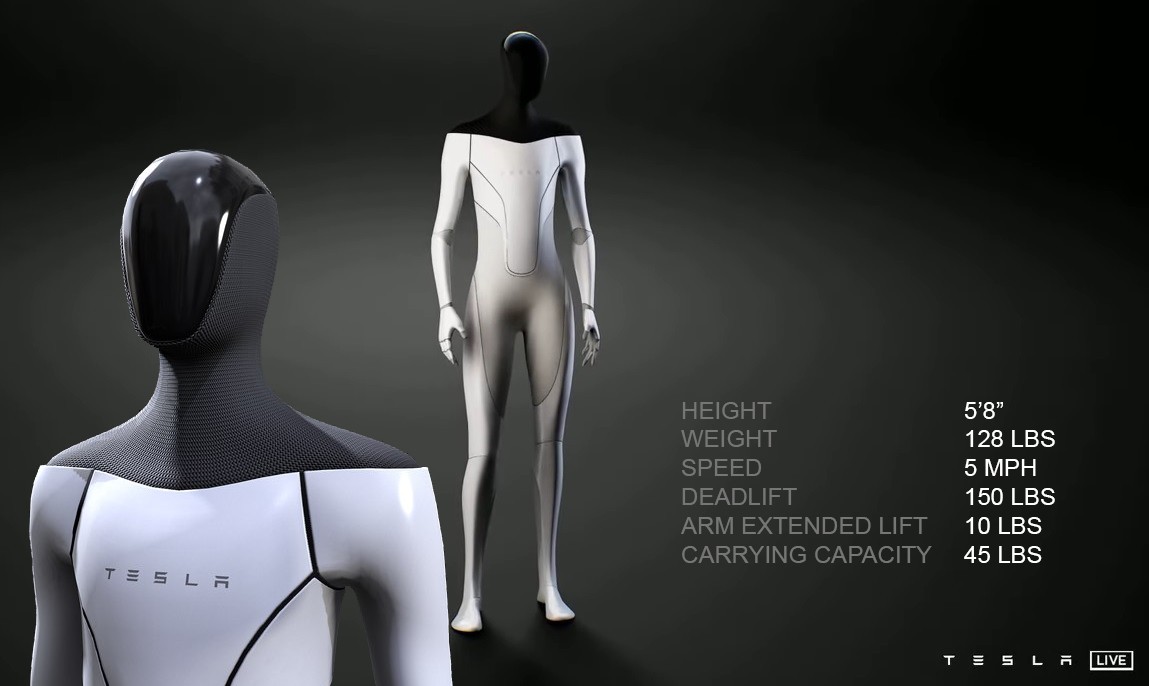
What other production (as opposed to prototype or "one-off") humanoids are out there and what are their specs? Let’s start with what information was provided in the announcement regarding the robot’s general specifications:
Tesla Bot
 |
|
It’s unknown just how much these specs will change, but without additional information, we’ll use these to compare. Here's the announcement:
Boston Dynamics’ Atlas
|
|
|

If you’ve been following Atlas’ roughly 30 years of development, from simply being able to stand under its own power while tethered to its current ability to do parkour, it’s safe to say it’s certainly one of - if not the most advanced humanoid robot currently in existence. Couldn’t Tesla simply buy Boston Dynamics from Hyundai to get a jump start on the technology? They may have tried, but without insider information it’s hard to know. Tesla Bot’s designers may also have a strong preference for electrical (rather than hydraulic) actuators, so Boston Dynamics’ technology is not transferable. Despite using hydraulics, Atlas needs its 3.7KW Li-Ion battery which provides up to ~1 hour operating time.
Pal Robotics Talos
 |
|
The Talos robot was developed for use in factories, rescue and space exploration. It’s capable of holding up to 6Kg in each hand and incorporates a variety of sensors for interacting with its environment and understanding itself (for example torque controlled balancing). Pal Robotics also has a “social robot” humanoid named ARI which uses a wheeled base and upper torso.
Honda Asimo
 |
|
Honda’s Asimo robot has been in development for decades (started around 1986). Note that although a previous prototype, the P2, was almost 6 feet tall (182cm) and weighed over 450 pounds, Honda took the decision to reduce the robot’s height to 130cm “to accommodate human living spaces”. It's Honda’s hope that “robots will someday coexist with people”. Will people who are shorter than 5’8” easily accept the Tesla Bot or feel a sense of intimidation? In 2001, Honda introduced the Asimo as a rental service, since the robot’s actual price would be theoretically close to $2.5 Million USD.
Additional videos: https://asimo.honda.com/asimotv/
Agility Robotics’ Digit
 |
|
Digit is a fairly new (2015+) bipedal humanoid robot which was an evolution of their bipedal robot “Cassie”. Digit’s upper torso includes integrated sensing, computing, and two 4-DOF arms that can carry up to 40 pounds (18 kilograms). Digit also has two 2-DOF feet, sealed joints for outdoor operation, a UN 38.3 certified battery for cargo air shipment, and an API so it can be used as a development platform. Digit navigates autonomously thanks to LiDAR and other sensors. Digit sells for $250k USD.
Others
Although there are a number of semi-production humanoid robots, there are far more prototype robots.
There are also quite a few which were produced or prototyped which have since been discontinued.
- Samsung's Roboray
- HRP-5P (no news in a while)
Actuators
Let’s start with the actuators which convert electrical energy to mechanical motion. What actuators are available which are ultralight and high torque (i.e torque density)? Tesla’s video shows cylindrical “puck” style actuators at each joint, of different sizes, with the following degrees of freedom:
- Total: 40 Degrees of freedom (DoF)
- Hands: 6 each
- Arms: 6 each
- Legs: 4 each
- Feet: 2 each
- Torso: 2
- Neck: 2
- Force sensing / feedback
The main issues surrounding actuators are that in order for an actuator to provide high torque, it tends to need high current and a higher actuator mass to integrate the required coils and magnets. A higher current draw means increased battery use and lower operating time. It becomes a problem of having to increase the weight of the actuator to get more torque which consumes more battery power, making the robot heavier and requiring more torque and a larger battery.
“Cramming 28 active degrees of freedom that all do force control, position control, and high bandwidth into a small machine {like the Atlas Robot} is actually quite challenging,”
- Aaron Saunders, VP of Engineering of Boston Dynamics.
There is also a problem of damping and suspension in the legs (as anyone with knee issues can tell you is quite important), because unlike wheeled or tracked robots, each step involves an impact with the ground. Fortunately this can be resolved largely mechanically with today’s technology. The top three choices of actuators might be:
Strain Wave gearbox + frameless brushless DC ("BLDC") motor
 |
A BLDC motor doesn’t provide much torque and operates at high speed, but coupled to a lightweight and high efficiency harmonic gearbox, a nice balance between speed and torque can be reached. Maxon, Faulhaber and Kollmorgen are some of the leaders in the DC motor field, and Harmonic Drive Systems is one of the leaders in strain wave gears. Alternatively, Boston Dynamics’ Spot robot uses a BLDC motor and small ratio timing belt system. A less expensive alternative to a strain wave system would also be a single stage planetary gear reduction system or cycloidal gearing. |
Direct drive / torque motor
 |
A torque motor doesn’t have a gearbox and is mechanically much simpler (and therefore more reliable) than a geared motor. However, these currently require high current, which is in most cases higher than geared motor. Leaders in this field include Kollmorgen and Maxon among others. |
Hydraulics
 |
Hydraulics are capable of high forces or high torque, but have potential issues like leaking, and added weight of hydraulic fluids and one or more pumps and valves. Boston Dynamics used prototype electrically driven hydraulic actuators from the company Moog and seem to have been able to overcome the added weight:
|
Materials
“Lightweight” is all the information Tesla’s presentation provided when it came to the materials which will be used to make the Tesla Bot. In the Q&A, Elon mentioned that “Volume manufacturing is extremely difficult and underrated and we’ve gotten pretty good at that”. There are a few standard lightweight and strong materials available which could easily be used for such a robot:
Carbon Fiber
 |
This can be formed into very complex shapes, and newer technology can 3D print carbon-reinforced structures, eliminating as much excess weight as possible, while reinforcing. If layered carbon fiber is important, robot arms are slowly taking over this task from humans. |
Aluminum
 |
Just as with Tesla’s cars, their use of large aluminum high-pressure die-casting (which reduced the car body line by 60-70% in size) and/or machined aluminum is an excellent and recyclable option. Boston Dynamics “3D printing {metal additive manufacturing} technology has also been key to this version of Atlas.” |
Plastic
 |
These days, plastic is used everywhere with the most common being ABS. For increased strength, polycarbonate (“Lexan”) is used. Plastic can significantly reduce the cost of parts if the robot is intended to be mass produced and can be molded, machined or 3D printed. |
Titanium & Magnesium Alloys
 |
Titanium and magnesium metals are still exotic but are used in high end cars and aircraft. Titanium is not easy to work with, neither is magnesium but considering Titanium can be as strong as steel and 45% lighter, it lends itself well to this application. Magnesium is used in aluminum alloys, though magnesium is more easily flammable than other metals. |
Brain & Programming
The presentation mentioned the following key features of the Tesla robot might include:
- Neural Networks (Tesla)
- Neural net planning
- Auto-labeling
- Simulation & Tools
- FSD hardware (Full Self Driving)
- DOJO training (using Tesla’s DOJO supercomputers)
- Level 5 autonomy (compared to Tesla’s current level 2 for cars)
- Screen for user interaction
“The AI systems that guide the movements of robots such as Atlas require a huge amount of training, orders of magnitude more than a human would need."
- Ben Dickson for TechTalks
Fortunately this is really where Tesla excels. On their AI page, they are pursuing the DOJO AI chip (and system), neural networks, autonomy algorithms, code optimization, over-the-air firmware updates and more. The code base which goes into their self-driving cars will undoubtedly be adapted for use in the robot, and likely for multiple purposes:
- Autonomous navigation: detecting and figuring out obstacles and how to get from point A to point B.
- Simulation: This can include anything from gait optimization (to ensure maximize efficiency and power use) to the motions needed to pick up or put down different sized objects at different heights, to what to do in case of a fall.
- Detection: On their own, cameras and sensors don’t serve any purpose and need well written code to do things like converting pixels into objects, distance readings into shapes and more.
- Networking: As Boston Dynamics has found, simulations can only go so far, and real-world experience takes time, so sharing information with a central system as well as with other robots will significantly speed up development.
During a presentation, Elon was asked “To what extent will you open source what you do {cars or other projects}?” to which he replied “It’s extremely expensive to create the system and somehow that has to be paid for, and I’m not sure how to do that if it’s open sourced”. {...} “The robot is not prompted specifically by manufacturing needs, but we’re making the pieces that are needed for a useful humanoid robot”.
If verbal commands are one of the goals of the project, and it is intended for mass market use, then a human saying something as simple as “Tesla Bot, grab me an apple from the fridge” requires (generally) the following processes:
- Converting the (audio) speech to text, separating the letters into words, all while factoring in different accents and not considering multiple language support and differences in sentence structure.
- Understanding the various words used like “grab” (verb), “me” (object), apple (noun) then the intent of the sentence, like is the human asking a question, requesting an action, making a statement or something else.
- What is a “fridge” (and where can it be found), and how to interact with it? For example how would the robot know that a refrigerator needs to be opened, and how? A fridge is normally in a location among many other objects (cabinets, stove, microwave) and there are many possible models, shapes, colors and configurations of refrigerators.
- Navigating to the fridge requires knowledge of the layout of the building, any obstacles between it and the destination and path planning. Assuming the robot understands the human is requesting that the robot do something, the robot must be able to locate and differentiate the object (apple)
- Can it locate an apple if it is partially hidden in a drawer or at a weird angle? If there are many apples, which apple should the robot choose?
- Once the apple has been selected and retrieved, the robot must then bring it back to the requestor and must then know to find the original location or retrace its steps (or find a new path if needed) and then find the human which originally made the request.
- Did it forget to do something like close the fridge after? What will it do if its return path is blocked by a door, or if there are objects on the floor which it needs to walk over? The number of unknown situations is staggering.
Wheeled robots still have difficulty with tasks as general as this. The RoboCup @home challenge does not require that the robot be bipedal, nor have two arms, and tasks like opening a cabinet and retrieving a specific can of food takes time and often several tries. Nevertheless, Tesla is in a very good position to be able to tackle this large and complex issue.
Sensors
Robots intended to navigate in unknown environments need to be able to see and ideally map their surroundings. Since robots don’t have organic / biological senses like eyes, ears, a tongue, skin or a nose (among many others), these need to be replaced with electronics. Unlike RoboCup Soccer’s requirement of only allowing teams to use senses which are similar to that of a human, a real-world robot developed by a company is not restricted in what it can use.
Sight
 |
Humans have evolved to become accustomed to using their sight to know about their environment, so it is natural to want a humanoid robot to be able to “see” as well. Sensors used for this include: |
Touch
 |
Adding a sense of touch to a humanoid robot tends to be limited to certain areas of contact like the fingers or the arms. Sensing something like a foot’s contact with the floor however can be done indirectly using sensors in each joint. Sensors the Tesla Bot might use for this purpose might include:
|
Balance & Orientation
 |
Equilibrioception is the perception of balance, which humans often take for granted after having learned to walk on two legs. However for a robot, this often requires an assortment of sensors which work in harmony with the “brain (and inverse kinematics)” and actuators. Sensors used for this include:
|
Miscellaneous
 |
Beyond the sensors used to replace human senses, a wide variety of sensors can be incorporated.
|
Power / Battery
The presentation does not explicitly mention that the robot will have an onboard battery pack, but assuming they don’t foresee having an umbilical cord or “tail” dangling from the robot at all times, a high capacity, high discharge, low weight battery will be needed. It is safe to say that Tesla is already excelling in this field and for their automotive program, developing the best battery is needed. Although the best battery technology which developers may create in a lab may not reach a production vehicle, there may be the chance to adapt it for use in a humanoid.
Tesla’s cars use a Lithium-nickel-cobalt-aluminum battery chemistry and they are working on a cobalt-free design. However, fairly recently Tesla announced they would be shifting to cheaper Lithium-iron-phosphate for their EVs. Would they try to reuse this in a humanoid robot? It’s hard to envision the bot not using a Lithium-based battery since they are so widespread and can be shaped into different forms. However, mining Lithium is destroying the planet and there is a limited supply. Lithium batteries are also somewhat dangerous to transport given their flammability.
It’s unknown how far companies have advanced with “cutting edge” batteries, but some to consider include:
- Sodium Ion
- Zinc manganese oxide
- Organosilicon electrolyte
- Gold nanowire gel
- TankTwo String Cell
When in doubt, and to save development time, it would be easy to envision Tesla simply buying one or more battery companies to strengthen their own battery technology, beyond any of the university research partnerships they may be funding.
Features
Assuming the electromechanical design is successful, and the robot can stay upright, walk, get up from a fall and climb stairs, and has appropriate sensors, the rest of the functionality comes down to programming. Tesla’s approach so far seems to be to handle all software, and opening up the code for others to develop requires that Tesla divulge certain details about the hardware use can cause issues which break parts of the robot. This means that there is a strong chance that users will not have direct access to the robot’s firmware.
Potential applications:
- “{Tesla} is already the biggest robotics company in the world” - Elon Musk
- “It’s intended to be friendly” - Elon Musk
- “Grocery shopping” - Elon Musk
- “Unsafe, repetitive or boring tasks” - Elon Musk
- “Probably won’t work” - Elon Musk
- “Support manufacturing operations in tedious and exhaustive tasks” - Elon Musk
- “Like Siri or Alexa” - Elon Musk
- “Understand commands like “Pick up that bolt and attach it to the car with that wrench” - Elon Musk
- “Please go to the store and get me the following groceries” - Elon Musk
- “Friend and companion” - Lex Fridman
Boston Dynamics approach with Atlas is not necessarily to make a lot of money. Instead:
“Atlas’ [purpose] is really to drive innovation inside our group, to push us to understand how to marry controls on complex machines. It is also to create an impression of what robots can do. As we move toward the future, we’re getting closer and closer to when we’re going to turn these things into products.”
- Aaron Saunders, VP of Engineering of Boston Dynamics.
Is the state of modern robotic technology advanced enough for Tesla to succeed in this endeavor? The simple answer is yes. Tesla already specializes in most of the elements needed, from software to batteries, materials to actuators. Were this announcement to have been made from most other companies, their chances of success would be quite a bit lower. Will they be able to succeed in around one year? That will likely depend on the knowledge transfer within the company and the resources they make available.
The question of the Tesla Bot succeeding however will come down to people’s expectations. Having a robot which can walk, turn and avoid obstacles autonomously and under its own power will be, to most people in the robotics field, an amazing accomplishment even if it takes a few years. However if the robot is hyped as being able to help with tasks without significant training in unknown environments and it falls short of that goal, normal people may be unimpressed. What are your expectations about the Tesla Bot? Do you think it's feasible? What are their major obstacles, or major advantages? Reply in the comments section below.
Interested in knowing more about humanoid robots in 2022? The following article covers the top 10 large humanoid robots (production and prototype): https://link.springer.com/article/10.1007/s43154-021-00050-9
References
- Battery technology: https://www.gray.com/insights/5-new-battery-technologies-that-will-change-the-future/
- Inside Boston Dynamics: https://venturebeat.com/2021/08/27/inside-boston-dynamics-project-to-create-humanoid-robots/
- Boston Dynamics’ 3D Printing: https://www.digitalengineering247.com/article/boston-dynamics-robots-include-3d-printed-components/
- Evolution of Boston Dynamics’ Atlas: https://bdtechtalks.com/2021/08/23/boston-dynamics-atlas-robot-parkour/
- Honda Asimo FAQ: https://asimo.honda.com/downloads/pdf/asimo-technical-faq.pdf
- Lithium Mining: https://interestingengineering.com/clean-evs-and-dirty-lithium-mining-business
- Lithium Battery Chemistries: https://www.fluxpower.com/blog/lithium-ion-battery-materials-and-why-their-chemistry-matters
- Spot Robot: https://dev.bostondynamics.com/docs/concepts/about_spot
- Digit Robot: https://www.kgw.com/article/tech/agility-robotics-oregon-robot-package-delivery/283-fc6eb423-34fd-413c-87c9-f72d33e96426
- Tesla Battery Technology: https://www.bloomberg.com/news/articles/2021-10-20/tesla-shifting-to-cheaper-battery-chemistry-tried-in-china
- Tanktwo: https://www.tanktwo.com/
- Boston Dynamics: https://spectrum.ieee.org/boston-dynamics-marc-raibert-on-nextgen-atlas
Thanks for helping to keep our community civil!
This post is an advertisement, or vandalism. It is not useful or relevant to the current topic.
You flagged this as spam. Undo flag.Flag Post