


Andromina robot v.1.2, a rover with 4 directional wheels.

Andromina robot v.1.2 is a 4WD robotic platform with four directional wheels. The four wheels can independently turn. The robot can maneuver multiple ways. The motions of the robot are similar to a Mars rover of Nasa.

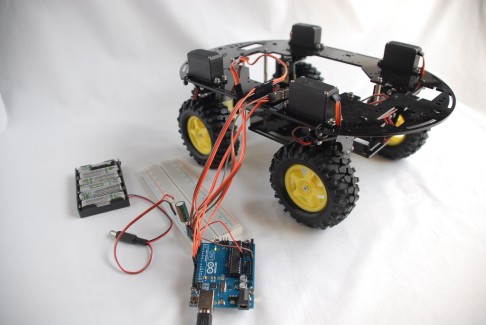
The robot allows be extended with several electronic devices; Arduino boards, Raspberry PI boards, Picaxe boards, robotic arms, web cams, LCD screens, encoders and other devices. In this post I show the Andromina robot which it is controlled to a IR remote control of a TV PHILIPS. The robot has the basic configuration, with an Arduino UNO board, a proto shield modified with a voltage regulator of 5v, a motor board and a IR remote control. In this configfuration the robot sketch is a bit complex and we can add a lot of movements and functions. In the sketch, we have set preset buttons with a maneuver or buttons for example to accelerate or turn the robot.
in progress....
More information : http://androminarobot-english.blogspot.com.es/


Construction:
Next picture shows the assembly parts of robot:

Main parts of the robot chassis are 2 acrylic plates, the superior plate and the inferior plate. The assembly of the chassis is shown in the picture above:



Andromina robot carries four servomotors "turrets" to rotate the four CC motors. The servomotors are very strong. The four servos have two ball bearings and several metal gears. You can see the pictures below. There is a picture shows one bearing and metals gears of the servos:







Robot motions:







A rover with 4 directional wheels.