


Stomper - 3 servo hexapod
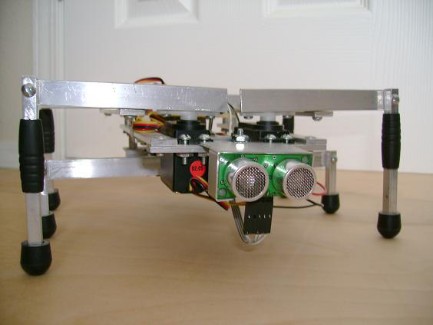
This is "Stomper", a 3-servo walking robot I built a few years ago from plans in Karl Williams "Insectronics" book. I've resurrected him from my robot junk pile to be my first robot posted here. He wanders about making noise until he runs out of battery power or we get tired of him stomping about frightening the cat or one of our dogs. He uses an SRF04 ultrasonic ranger to "map" the space in front of him and avoid obstacles.
Since several here are asking a bit more information. Here's another go... :-) I've attached a few more photo's and a bit more description for those that who are interested in the mechanical details.
Top view

Bottom view

Here is a link to the "Insectronics" book on Amazon, you might be able to find a copy at your local booksellers as well. If you want to build one, be forewarned this isn't exactly a beginning project! You will need to make pc board if you follow the directions in the book. You will also need a Pic programmer to program the PICmicro 16F84A. I built my programmer from another book - the "el-cheapo programmer" from "Programming and Customizing PICmicrontrollers" by Myke Predko.
The software demonstrated in the YouTube video is straight out of the Insectronics book, this link: minimap.bas will show you the code I used. You could also use room-mapping.bas for nearly identical behavior - though a bit more open to some fun hacking!
If you are good with translating code, it should be easily adaptable to a BASIC Stamp or PicAxe (that is so popular here). Since the pc board is very close to the same size as an Arduino I am tempted to convert to that (maybe I will sometime, hmmm).
Stomper is built of hobby aluminum I found at my local hardware store, as well as the little rubber bumpers I used for the feet. You will need some basic metalworking tools to build the body - a hacksaw, a drill, a tape-measure, and a screwdriver should do it. The book assembles him with small bolts, I used pop-rivets on the non-moving frame parts, bolts and lockwashers elsewhere. I also put a dab of superglue in the leg joints as the bolts loosened from walking.
In case anyone wants to know Stomper is about 21cm x 20cm, stands about 10cm tall (~ 8.5" x 8", 4" tall)
Have fun!
Navigates around using ultrasound
- Actuators / output devices: 3 - Hitec 325bb servos, piezo speaker
- Control method: autonomous
- CPU: Microchip PIC 16F84A
- Operating system: none
- Power source: One 9V and 4 AA batteries
- Programming language: PIC Basic
- Sensors / input devices: SRF04
- Target environment: indoor on smooth surfaces