

















Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Descripción
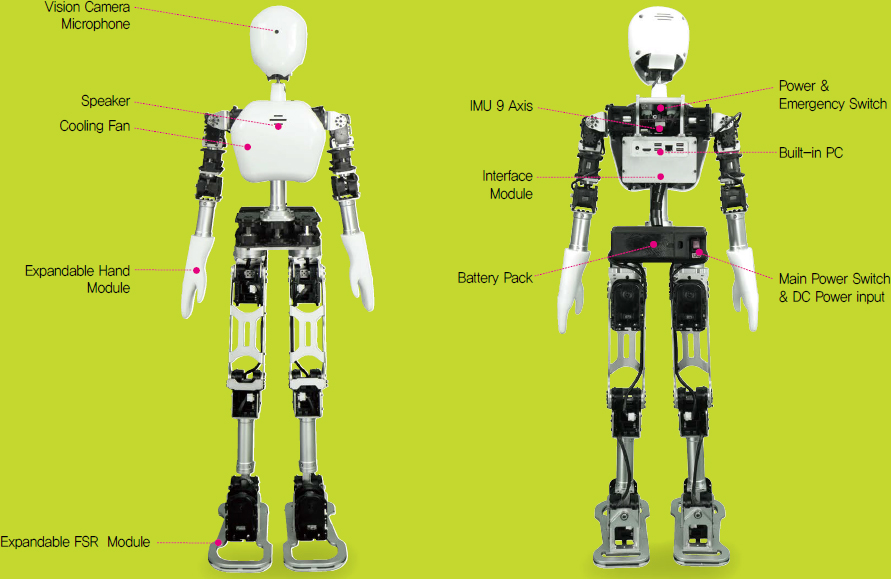
- Robot Humanoide Robobuilder UXA-90
- Robot con forma humanoide bien proporcionado de 1m de altura
- Algoritmo de detección de caídas que utiliza un sensor IMU de 9 ejes
- Procesamiento de visión de 300FPS a 320x240 píxeles
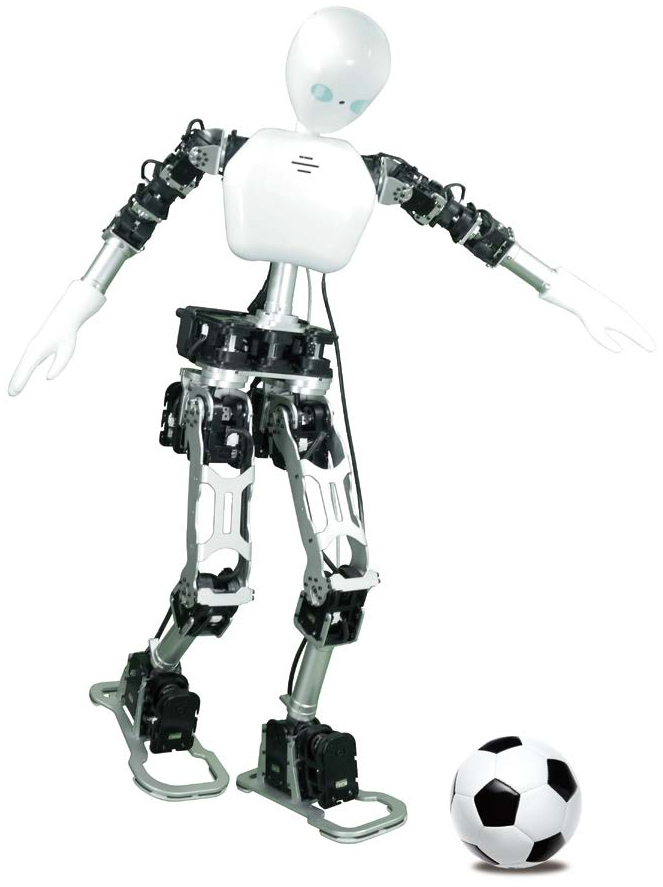
- Totalmente compatible con el modo de fútbol para la competencia Robocup
- Algoritmo de marcha para robot humanoide bípedo con control de equilibrio
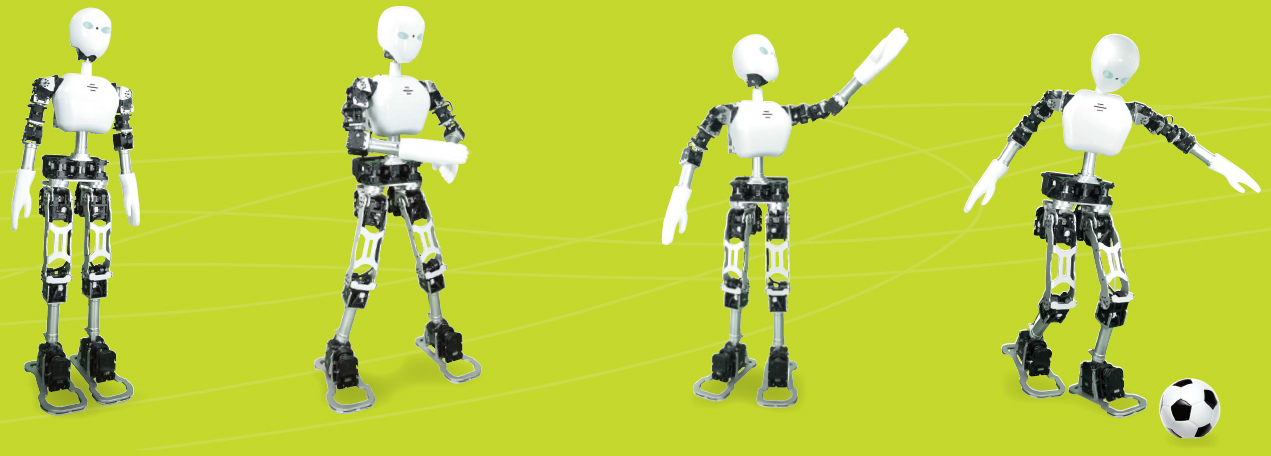
El Robot Humanoide Robobuilder UXA-90 es un robot con forma humanoide bien proporcionado de 1m de altura. Ha sido diseñado con una estructura similar a la proporción del cuerpo humano ideal. Dado que la estructura esquelética del robot imita la de un humano, es posible producir patrones de movimiento similares a los humanos. Debido a que utiliza varias fuentes de programación, se puede controlar de muchas formas diferentes. El robot también tiene gestos emocionales preprogramados y expresiones bucales con sonidos sincronizados.

Se proporcionaron archivos fuente para todo el diseño del cuerpo y archivos STEP rediseñados para el marco exterior y base
Los usuarios pueden crear una nueva apariencia para el robot utilizando los diversos archivos fuente prediseñados. Los archivos de origen proporcionan detalles para ensamblar la estructura, como el tamaño, la posición de los dispositivos, los pernos y las tuercas.
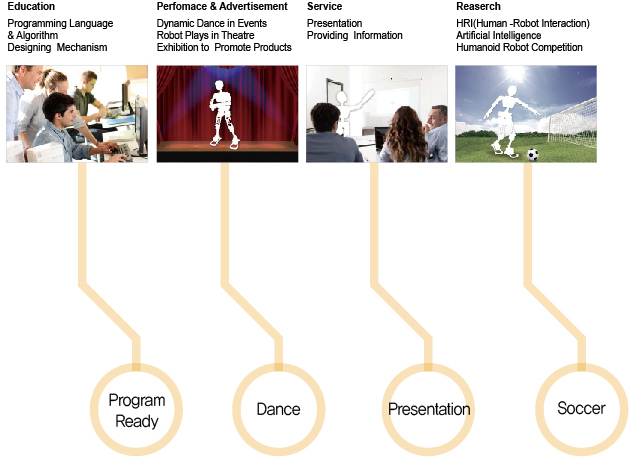
Proporciona varias aplicaciones
Desde una actuación en el escenario hasta una presentación en nombre de una persona, este robot lo hace todo. Además, el robot se puede usar para participar en una competencia de robots humanoides y también se puede usar como una plataforma en la investigación de HRI e IA, así como en la educación de programación.
Educación
- Lenguaje de programación y algoritmo
- Mecanismo de diseño
Rendimiento y publicidad
- Danza dinámica en eventos
- Robot juega en el teatro
- Exposición para promocionar productos
Servicio
- Presentación
- Proporcionar información
Investigar
- HRI (Interacción de robot humano)
- Inteligencia artificial
- Competencia de robots humanoides
Proporciona varios códigos fuente de programación y bibliotecas basadas en código abierto.
Software de reconocimiento de objetos basado en Windows
- Código fuente de Visual C # para rastrear un objeto con procesamiento de visión
- UXA90 puede jugar al fútbol por su cuenta en la competencia ROBOCUP
Herramientas de software de gestión
- Software de control SAM para gestionar servos individualmente
- Herramienta de creación de contenido y movimiento
- Herramienta de planificación de patrones de comportamiento
- Herramienta de gestión de movimiento
Basado en Android
- Aplicación de Android para control y construcción
- La aplicación de Android controla y crea patrones de comportamiento y movimiento de forma inalámbrica
Basado en Linux
- Marco basado en ROS
- Gazebo para simulación de dinámica de cuerpos rígidos en 3D
- Complemento rviz para entornos de visualización 3D
Características
- El diseño del cuerpo se asemeja al hombre de Vitruvio de Da Vinci
- Muy bueno pateando el balón y localizando la red
- Habla y reproduce sonidos con un altavoz de 3 W
- Reconoce y sigue el color y la forma de un objeto (por ejemplo, una bola naranja)
- Cálculos de distancia en tiempo real
- Función incorporada de comportamiento de levantamiento automático desde la postura supina
- Proporcionar una herramienta de software para crear fácilmente movimientos de rendimiento
- El movimiento de rendimiento se puede sincronizar completamente con la fuente de sonido
- Altura: 100cm
- Ancho: 35cm
- Peso: 9kg
- Velocidad de caminata: 30 cm/s, paso completo caminando hacia adelante
Grados de libertad
- 23 DOF
- 12 DOF pierna, 8 DOF brazo
- 1 DOF de cintura, 2 DOF de cabeza
Brazo 4-DOF (x2)
- Codo: 2 DOF SAM30 x2
- Hombro: 2 DOF (SAM160 x1 / SAM100 x1)
Pierna 6-DOF (x2)
- Cadera: 3 DOF (SAM160x1 / sam210 x2)
- Rodilla: 1 DOF (SAM210 x1)
- Tobillo: 2 DOF (SAM210 x2)
- Cintura 1-DOF (x1): 1 DOF (SAM160x1)
- Cabeza 2-DOF (x1): 2 DOF (SAM30 x2)
Sensores
- Inercial: IMU 2g 9 ejes, + - 180 grados (balanceo / guiñada), + -90 grados (paso)
- Módulo FSR (opcional) x2: 4 sensores en cada pie
Computadora
- CPU: Procesador Intel Core i3-1115G4 (caché de 6 m, hasta 4,10 GHz)
- Samsung DDR4 de 8 GB PCS-21300
- Crucial P2 M.2 NVMe 250GB TLC
- Inalámbrico: Bluetooth / Intel WI-FI 6 AX201
Interfaces externas
- USB 2.0 x2, Ethernet 10/100/1000 Base T
- USB 3.0 x2, HDMI x1
Interfaces
- Altavoz: 1 juego
- Micrófono: 1 juego
- Cámara de visión: HD 1920 x 1080 px
Batería
- Tipo: LiPo 18.5V, 3000mA
- Duración de operación: 20 min (movimiento frecuente) / 40 min (en espera)
- Tiempo de carga: 30 min.
SO: Windows 7 o Linux Ubuntu 14.04
Basado en Windows
- Software de creación de movimiento fácil / aplicación C # en modo fútbol / muestras de MSRDS con sensor Kinect
- Modo de fútbol autónomo, modo de rendimiento, modo de presentación
- Movimientos de marcha y rendimiento preprogramados
Linux Ubuntu 20.04 LTS (ROS1 Noetic, OpenCV 4.xx, compilador QT)
- Paquete de middleware base ROS
- Gazebo para simulación 3D de dinámica de cuerpos rígidos
- Complemento Rviz para entornos de visualización 3D
- Control de caminar / agarrar / reconocer