















Payments and Security
Your payment information is processed securely. We do not store credit card details nor have access to your credit card information.
Included in this bundle
- 1 X RBC-Kel-04 - Leo Rover v1.8 Developer Kit
- 1 X RBC-Kel-05 - Li-Ion 6S 11.1 V 5000 mAh Battery for Leo Rover 4WD Developer Kit
Description
- Leo Rover v1.8 Developer Kit w/ Extra Battery
- Payload Capacity: upto 5 kg
- Designed to be reliable, watertight, and extendable
- Provides up to 4 hours of continuous driving
- Features a 5MP camera and live streaming
- Open-source and ROS-based
The Leo Rover v1.8 Developer Kit w/ Extra Battery is designed to be reliable, watertight, and extendable. It uses 4 in-hub DC motors with a 73.2:1 planetary gearbox and 12 CPR encoders and drives on 4 wheels with 130 mm diameter and rubber tires with foam insert (non-pneumatic).
The built-in camera has a resolution of 5 MP and uses a Fisheye lens with a 170-degree field of view. The rover’s intuitive live-streaming software was inspired by the missions carried out by exploration robots on Mars.
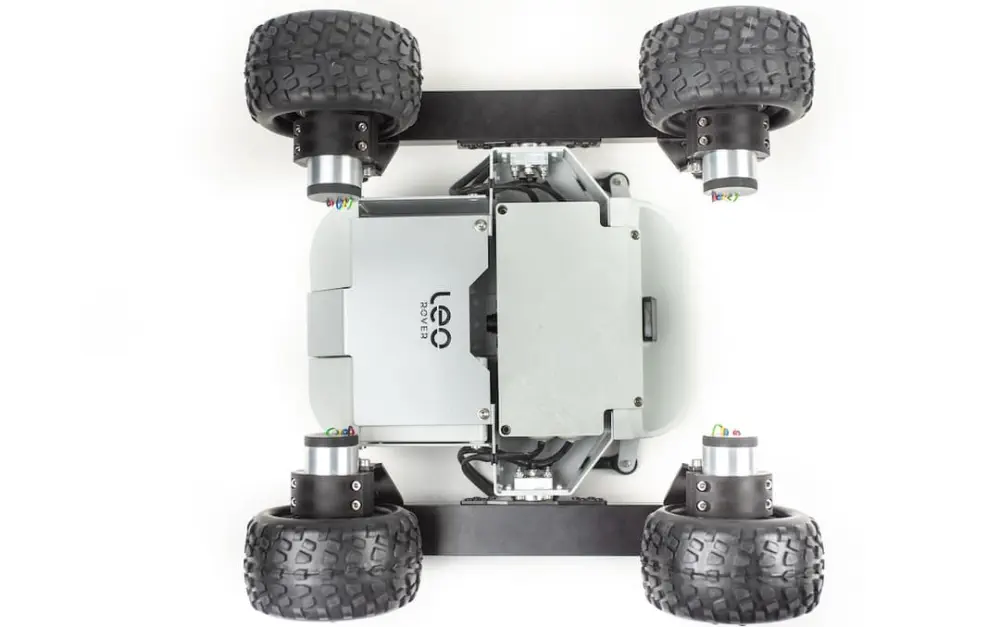
It is more compact and lighter than most, the Leo Rover mobile robot consists of a rectangular platform mounted on a 4-wheel drive chassis, capable of adapting to the most difficult terrains as it's designed to be reliable, watertight, and extendable. Open-source reversible software enables you to go deep into a core and gives you the opportunity to freely try new ideas.
This Raspberry Pi mobile robot can generate a WiFi hotspot to which you can then connect simply using your tablet, mobile phone, or computer. You will then benefit from a 2.4 GHz wireless connection and be able to control your mobile robot remotely on Windows, macOS, Android, and Linux.

By default, Leo Rover is remotely controlled with video streaming and UI ready-to-go. It's not autonomous, but it's autonomy-ready. The software is based on Ubuntu 20.04 and Robot Operating System (ROS) which is known for easiness of autonomy and semi-autonomy features implementation.
The simplest way is to add a lidar or stereovision camera to enhance the Rover self-navigation and then build your features on top of that. The Rover itself has one front camera and 4 wheel encoders on board, so it provides video streaming and basic odometry out-of-the-box.

Please note: As the manufacturer constantly works on improving the design, the Rover you receive may look and act a little differently than seen in the videos and demos.
- 1x Leo Rover v1.8 Developer Kit (Unassembled)
- 1x Extra Battery
- 1x Battery Charger
- 1x Hex-head screwdriver to mount/dismount additional modules
Tools needed to assemble: everything is in the box.
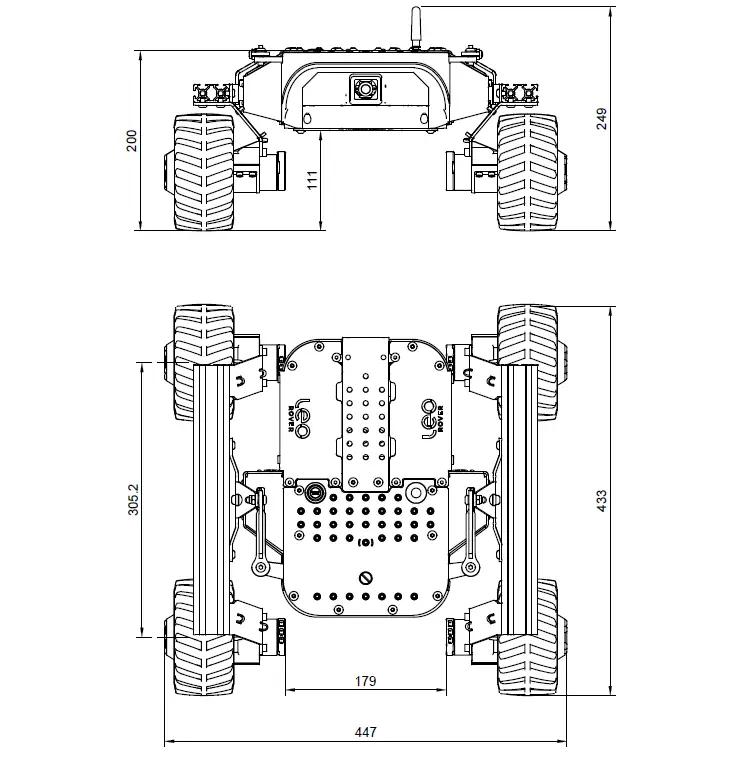
Size
- 447 x 443 x 249 mm (L x W x H)
- Wheel Diameter: 130 mm
Upper Platform Mounting
- 299 x 183 mm
- Hole Grid: 18 x 15 mm
- Holes: 40 x Φ7 mm + 22 x Φ 5.5 mm
- Payload Capacity: Upto 5 kg
- Camera Resolution: 5 MP
- Lens: Fisheye with 170° field of view (IR non-filtered | night-vision allowed)
- Weight: 6.5 kg
Performance
- Protection Rating: complies with IP66 (not certified)
- Run Time: Estimated 4 hrs of nominal driving
- Connection range: Up to 100 m (with live video stream)
Wheels
- Motors: 4x in-hub DC motor with 73.2:1 planetary gearbox and 12 CPR encoder
- Tire material: Rubber with foam insert (non-pneumatic)
Battery
- Voltage: 11.1 V DC
- Capacity: 5000 mAh
- Type: Li-Ion with internal PCM Short-circuit, overcurrent, and over-drain safety features
- Max. current: 8 A (total for the whole Rover)
Network
- WiFi 2.4 GHz access point with external antenna
- WiFi 2.4 GHz + 5 GHz on internal RPi antennas for connectivity
Software
- Operating System: Ubuntu 20.04 + Robot Operating System
- Ready-to-go UI located under '10.0.0.1' when using standard Leo Software Image
- Open source firmware
Electronics
- RaspberryPi 4B 2GB (or higher) as the main computer
- LeoCore as real-time microcontroller: STM32F4 ( at 84 MHz, 64 KB RAM, 256 KB Flash)
Speed
- Max. Linear Speed: ca. 0.4 m/s
- Max. Angular Speed: ca. 60 deg/s
Connection interfaces - Externally available
- 1x Waterproof micro USB Socket
- 1x Antenna RP-SMA Male Socket
- 1x 3-Pin Weipu SP13 12V Power Socket
Connection interfaces - Internal open interfaces
- RaspberryPi's: 2x USB, 20x GPIO, RJ45 Ethernet, 1x RPi display port, Bluetooth 5.0 with BLE
Controller
- You need any web-enabled device to access stock UI under '10.0.0.1' in your browser
- Device requirements: Windows/Linux/Android/macOS
- For easier development, ROS on your device is highly recommended