")
")
")
")
")
")






Pagos y Seguridad
Su Información de Pago se procesa de forma segura. No almacenamos los datos de la tarjeta de crédito ni tenemos acceso a la información de su tarjeta de crédito.
Descripción
Kit de robot controlado por Mecanum programable
Placa completa Arduino incorporada (ATMega328p)
Dos puentes H dobles para control independiente de cuatro motores
Regulador de voltaje a bordo (solo se necesita una batería)
Compatible con una variedad de placas de expansión
Requiere soldadura
La batería LiPo se vende por separado
El DFRobotShop Mecanum Rover 2.0 - Robot Compatible con Arduino (Kit Básico) es un robot móvil versátil basado en el popular microcontrolador Arduino Uno. El Rover usa dos Caja de Engranajes con Doble Motor Tamiya , cada uno con su propio par de codificadores, así como una placa de expansión de controlador de motor doble ** para controlar las cuatro ruedas Mecanum de forma independiente. La PCB DFRobotShop Rover incorpora un controlador de motor Arduino Uno (montaje en superficie ATMega328), L293B (conectado a las patillas 5 a 8), regulador de voltaje y área de prototipos, y también funciona como parte de la estructura mecánica del robot. El regulador de voltaje incorporado permite alimentar toda la placa con tan solo 3,7V a ~ 9V *.

El DFRobotShop Mecanum Rover 2.0 - Robot Compatible con Arduino (Kit Básico) se basa en el éxito de la primera generación Robot de Seguimiento Compatible Arduino DFRobotShop Rover V2 (Kit Básico) e integra un cargador de LiPo (carga a través de USB), área de creación de prototipos de soldadura, huella de XBee y más. Las ruedas omnidireccionales Mecanum le permiten al Rover moverse en las siguientes direcciones:
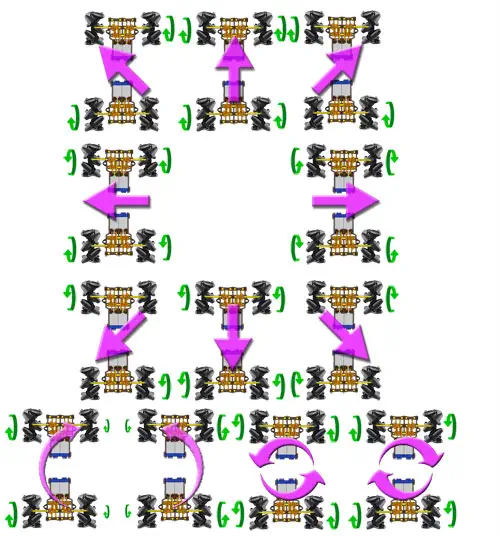
Es importante notar que debido a las fuerzas involucradas, algunas direcciones son notablemente más lentas que otras. Como ejemplo, avanzar y retroceder es considerablemente más rápido que los movimientos a la izquierda y la derecho. La rotación de CW / CCW sobre el punto central lleva más tiempo que en un rover de 2WD.
* Los motores incluidos con la caja de cambios Tamiya funcionan a hasta 5V. Los motores de 6 V se venden por separado.
** La PCB DFRobotShop Rover incorpora un controlador de motor dual, y la pantalla agrega un controlador dual que utiliza diferentes patillas, lo que le permite controlar cuatro motores de CC de forma independiente.
- 1x Controlador de Robot Rover V2 DFRobotShop
- 1x Rueda Mecanum Pack de Cuatro (con Cubos de Metal) 2x Caja de Engranajes con Doble Motor Tamiya
- 1x Soporte izquierdo
- 1x Soporte derecho
- 1x Placa de Expansión de Motor Dual para Arduino
- 2x Par de codificador para Caja de Engranajes de Motor Dual Tamiya
- 2x Hardware DF RobotShop
La batería LiPo se vende por separado
Archivos PDF
- Manual DFRobotShop Rover
- Esquema DFRobotShop Rover
- Hoja de Datos del Sensor de Luz
- Dimensiones del Soporte de Metal del FRobotShop Rover
- Esquemas de DFRobotShop Rover V2
Sitio web
Foro
Archivos ZIP
Blog