







Incluido en este paquete
- 1 X RB-Lyn-739 - Kit de Robot Hexápodo A-Pod Lynxmotion (solo hardware)
- 25 X RB-Hit-29 - Servo Motor Hitec HS-645MG
Descripción
- Kit de robot hexápodo A-Pod básico con marco, hardware y servos
- Piernas anguladas para un rango de movimiento adicional con 3 DOF (grado de libertad)
- Hecho con PVC y soportes de montaje de servo de aluminio de alta calidad
- Incluye aluminio durable y partes plásticas
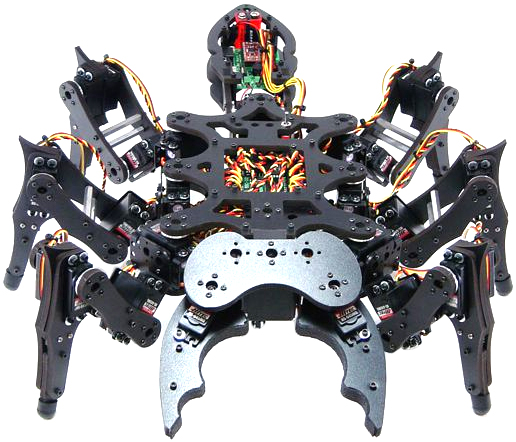
El Lynxmotion Kit de Robot Hexápodo A-Pod (Sin Componentes Electrónicos) está inspirado en insectos. Las patas anguladas proporcionan un rango de movimiento adicional. El diseño de tres patas DOF (grado de libertad) significa que el robot puede caminar en cualquier dirección. El robot ha sido diseñado para usar 18 servos HS-645 para las piernas y 7 servos adicionales para la cabeza y la cola. Es realmente increíble ver en acción.

Controlar el Robot
Al descargar la generación del pulso del servo y el tiempo de movimiento de la secuencia al SSC-32 (altamente recomendado para robots con múltiples patas), el microcontrolador tendrá mucha potencia para hacer cosas realmente interesantes. El programa Phoenix es compatible con BotBoarduino y permite que el robot camine con velocidad variable, en cualquier dirección (traducción), o giro en el lugar (rotación), o cualquier combinación de los dos. El levantamiento de piernas y la altura de marcha son ajustables, así como la velocidad de marcha. Puedes rotar el cuerpo en cada eje. Hay modos de caminar preestablecidos y modos de caminar para elegir. Todos estos son accesibles desde el controlador. El código Phoenix también es compatible con un modo de control en serie para controlar el robot a través de una conexión en serie.
Los mecánicos
El robot está hecho de PVC de corte preciso y soportes de servoejector de aluminio ultraduros de alta calidad.
- Kit de cuerpo A-Pod
- Kit de mandíbulas A-Pod
- Kit de cola A-Pod
- 3x Par de piernas A-Pod
- 6x Cable Extensor de Servo SEA-01 - 6"
- 1x Cable Extensor Servo SEA-03 - 24"
- 25x Servo Motor Hitec HS-645MG (133 oz in.) Servos estándar
Requiere (se vende por separado)
- BotBoarduino u otro microcontrolador
- Controlador servo SSC-32
- Cable de transferencia de datos USB
- Tamaño (total): 24,25'' (long.) x 17,00'' (anch.) x hasta 8,50'' (alt.)
- Tamaño (cuerpo): 9,375'' (long.) x 6,625'' (anch.) x 2,50'' (alt.)
- Peso (sin baterías): 6 lb 4 oz
Sitio web
- Control de movimiento del servo: lazo cerrado local
- Dirección: diferencial
- Número de patas: 6
- Grados de libertad por pierna: 3
- Velocidad de movimiento: 10 in/s
- Distancia del suelo: hasta 7,50''
Compatibilidad de opciones de potencia
- Cargadores: cargador inteligente universal NiCad y Ni-MH
- Pilas: paquete de pilas de 6,0 voltios Ni-MH 1600 mAh/2800 mAh
Estimar envío
ADVERTENCIA: Este producto puede exponerlo a sustancias químicas, incluyendo plomo y compuestos de plomo, que el Estado de California reconoce como causantes de cáncer y defectos de nacimiento u otros daños reproductivos. Para obtener más información, visite: www.P65Warnings.ca.gov.