







Descripción
- Plataforma de Robot Humanoide Unitree G1-D Ultimate E (Revo2 Tactile Hands)
- Sistema de percepción multisensorial
- Desarrollo secundario soportado; computadora de visualización incluida
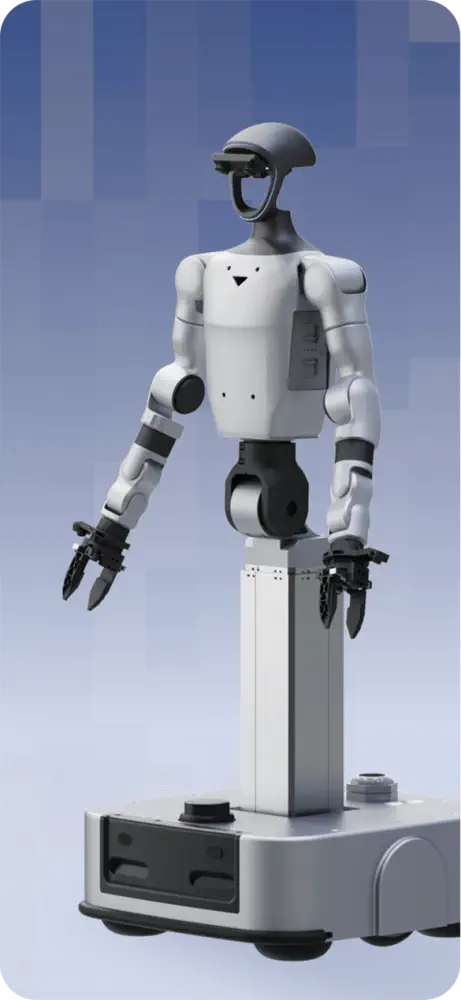
- Robot humanoide de base con ruedas y brazos duales
- Manos hábiles de cinco dedos BrainCo (Revo 2 Tactile & cámara RGB)
- Grados de libertad totales: 31
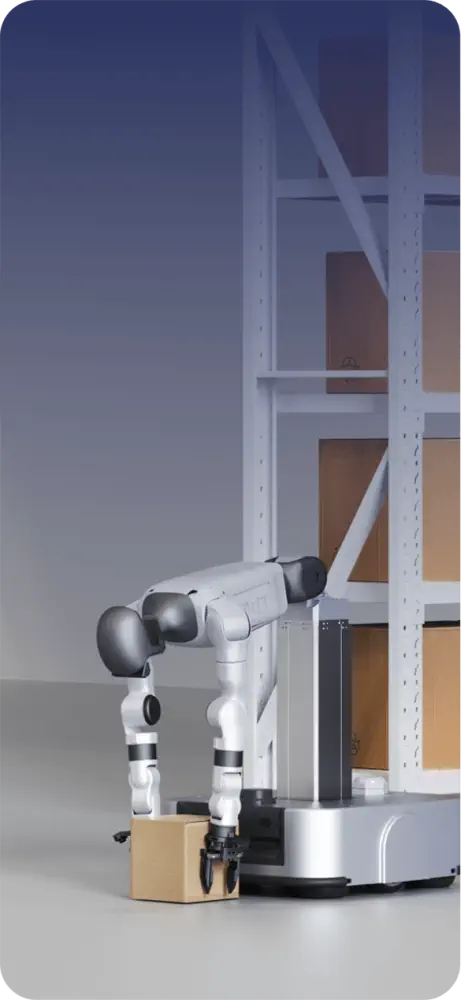
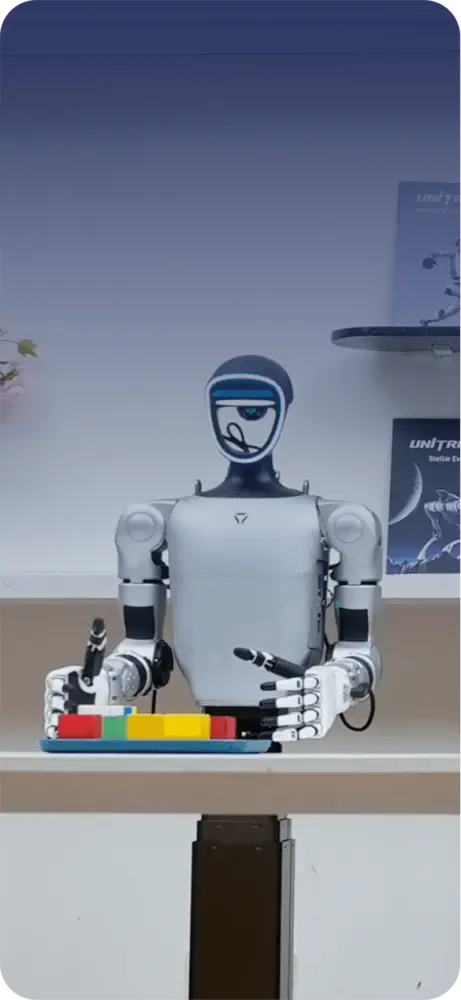
La Plataforma de Robot Humanoide Unitree G1-D Ultimate E (Revo2 Tactile Hands) es la configuración Ultimate E de base con ruedas G1-D que combina el chasis Ultimate A con manos hábiles de cinco dedos BrainCo Revo 2 (Edición Táctil, cámara RGB) incluyendo detección háptica (presión, fricción, dirección, etc.), posicionada como la opción móvil y habilitada para el tacto de cinco dedos.
La plataforma G1-D está construida alrededor de un cuerpo superior humanoide de tamaño completo con una estructura cinemática de 17 grados de libertad (excluyendo el efector final), una columna de elevación vertical con un recorrido de 500 milímetros para ajustar la altura de trabajo, y un conjunto de percepción multisensorial integrado (visión binocular montada en la cabeza más cámaras en las muñecas) para apoyar flujos de trabajo de manipulación y teleoperación; se suministra con la electrónica de control estándar/software y la interfaz de alimentación/carga requerida para su despliegue. Como distribuidor autorizado con soporte y logística local, RobotShop actúa como un único punto de contacto para la compra y el servicio postventa, reduciendo la fricción en comparación con una compra directa del fabricante y evitando la necesidad de enviar el robot al extranjero para soporte o resolución.

Productos genuinos con cobertura de garantía aprobada por el fabricante.

Aduanas, inspección y preparación manejadas localmente antes del envío.

Ventas, soporte y devoluciones gestionadas por un solo equipo.

Documentos, tutoriales y respuestas de la comunidad para avanzar más rápido.
para Robot Humanoide
Plataformas humanoides propietarias construidas de extremo a extremo con actuadores, conjuntos de engranajes, codificadores y detección integrada propios.
Un flujo de trabajo único que cubre todo el ciclo de vida de los datos: captura, procesamiento, anotación, validación y gestión de activos del conjunto de datos.
Soporta entrenamiento distribuido, creación de modelos personalizados y despliegue fluido, con compatibilidad en los principales marcos de código abierto.



Acelere la recopilación de datos y reduzca los costos de operación con flujos de trabajo flexibles y estandarizados, reemplazando métodos manuales lentos con un proceso repetible.

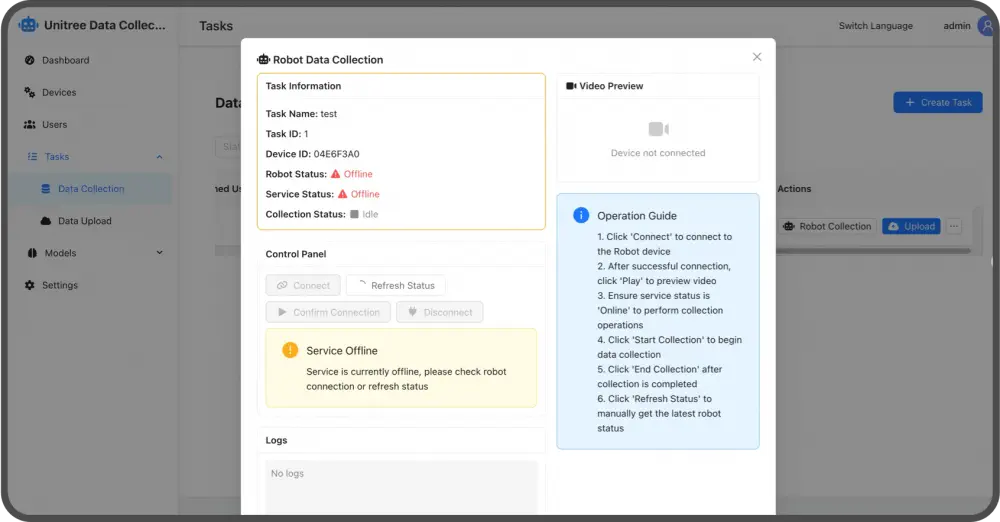
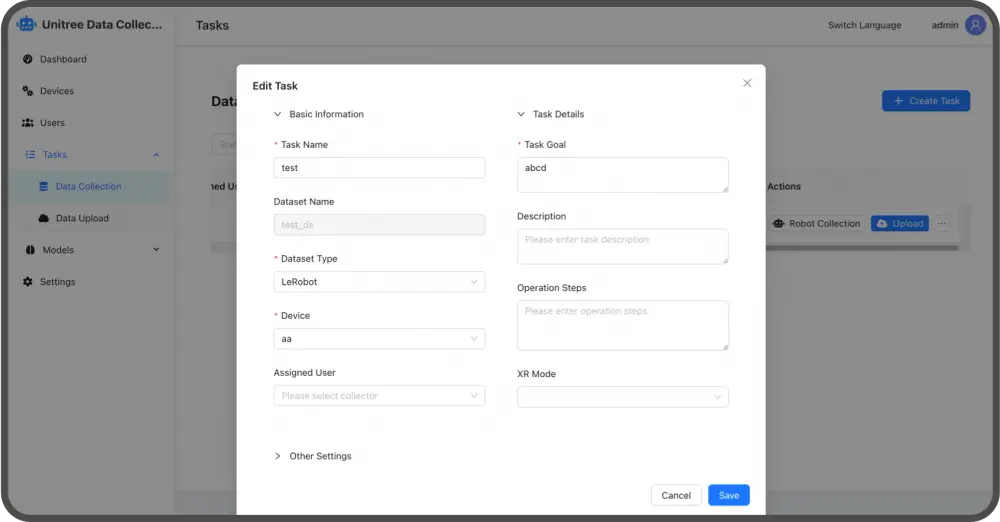
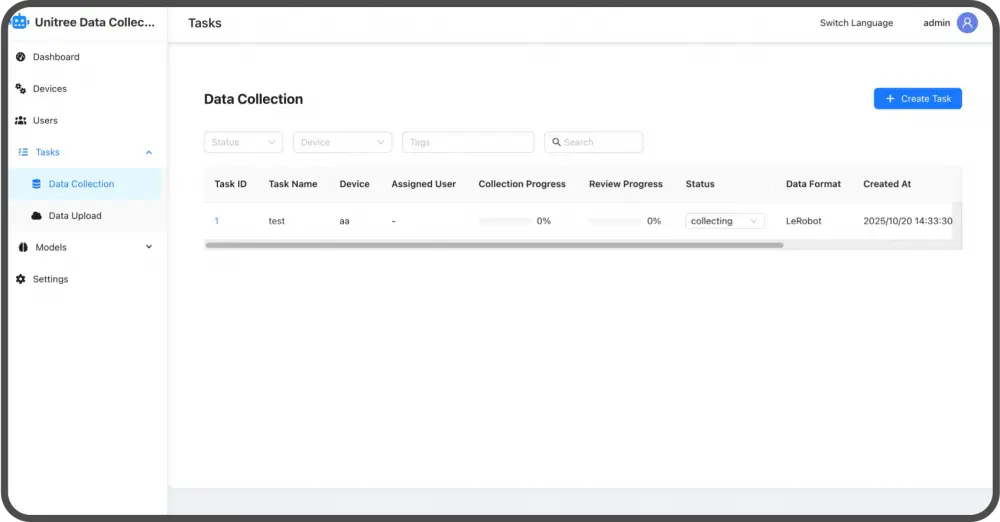
Combina la coordinación de proyectos, asignación de tareas, monitoreo de progreso y reporte de estado en un solo espacio de trabajo. Usando plantillas reutilizables, las tareas de recopilación pueden crearse con un solo clic. La visibilidad en tiempo real a través del pipeline mejora la colaboración y mantiene la adquisición de datos funcionando sin problemas.
Soporta la captura de datos en múltiples plataformas robóticas y configuraciones de efectores finales. Una fuerte estandarización convierte las entradas de dispositivos diversos en conjuntos de datos consistentes y de alta calidad listos para entrenamiento a través de un flujo de trabajo de extremo a extremo.
Diseñada para coordinar cientos de robots realizando una recopilación de datos sincronizada. Con servicios de alta concurrencia y programación equilibrada en carga, la plataforma ingiere y procesa de manera confiable grandes flujos de datos en tiempo real.
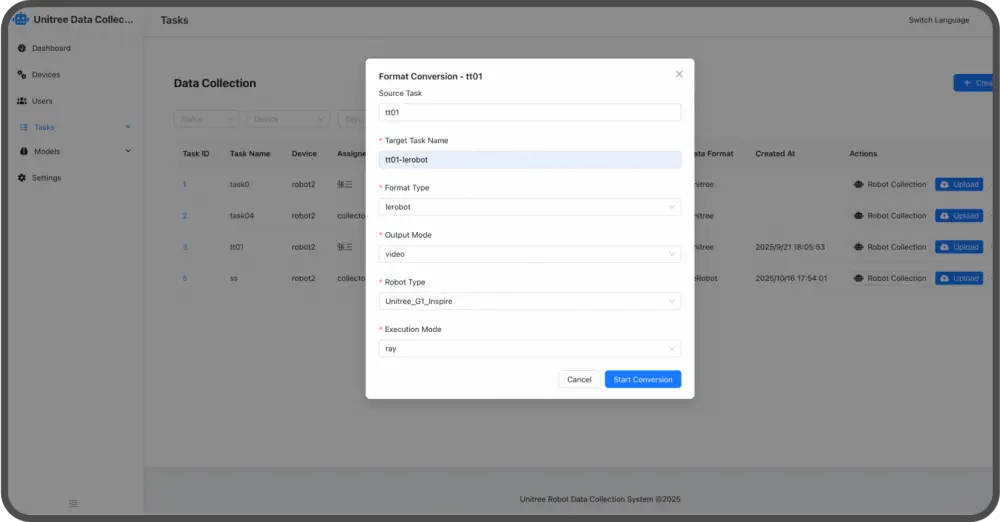
Construida sobre una base de servicio altamente disponible para soportar una recopilación confiable 24/7. La amplia compatibilidad de formatos permite que las salidas se utilicen directamente o se conviertan en formatos de entrenamiento ampliamente adoptados, acelerando los ciclos de I+D.
-
1Crear Nuevas
Tareas de Recopilación
de Datos -
2Actualizaciones de Tareas
y
Asignación -
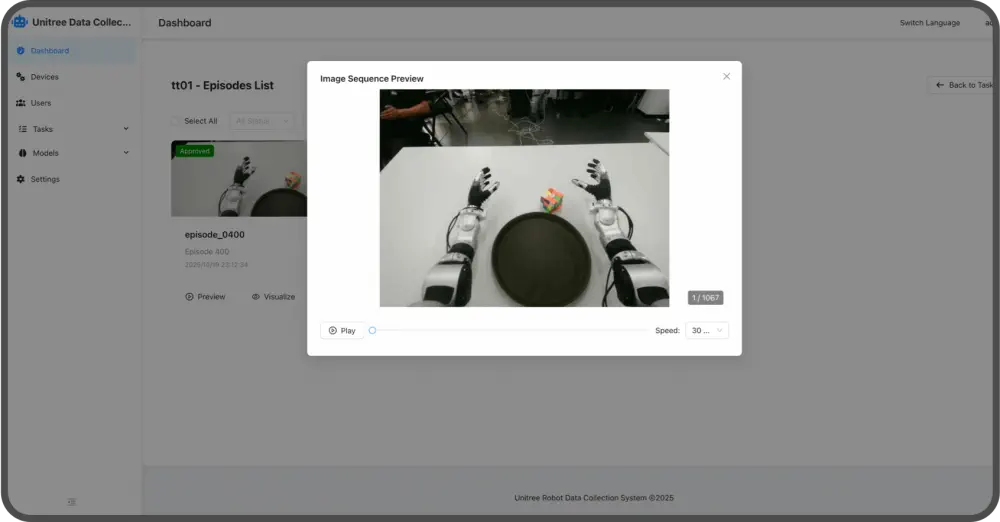
3Captura de Datos
y
Anotación -
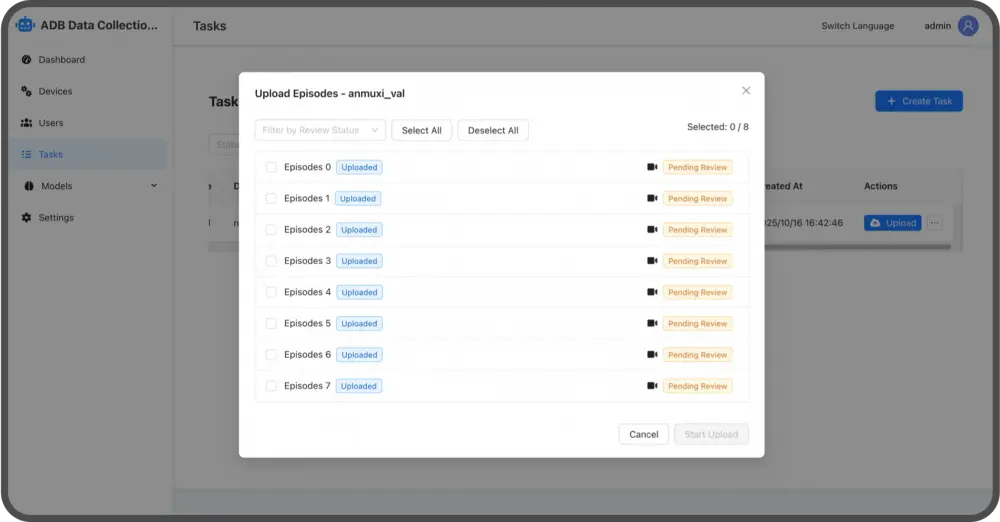
4Subir Datos
y Revisar -
5Archivado de Datos
-
6Exportación de Conjunto de Datos
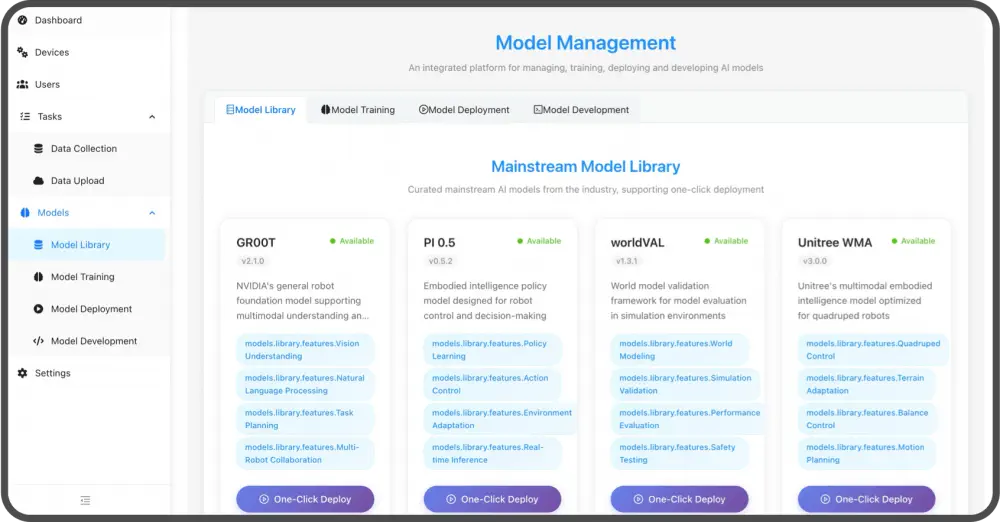
Cubre el flujo de trabajo completo desde la preparación de datos hasta el despliegue con un solo clic. La plataforma se integra sin problemas con los marcos de modelos robóticos de código abierto más utilizados.
Un ecosistema de modelos abiertos con conjuntos de datos comunitarios integrados y soporte para entrenamiento en conjuntos de datos de código abierto. También proporciona una integración profunda con modelos de código abierto líderes como PI y GROOT.

Incluye una biblioteca de activos 3D de alta fidelidad y alta precisión. Al construir escenas de simulación realistas, produce rápidamente planes de evaluación completos para apoyar la verificación de algoritmos.

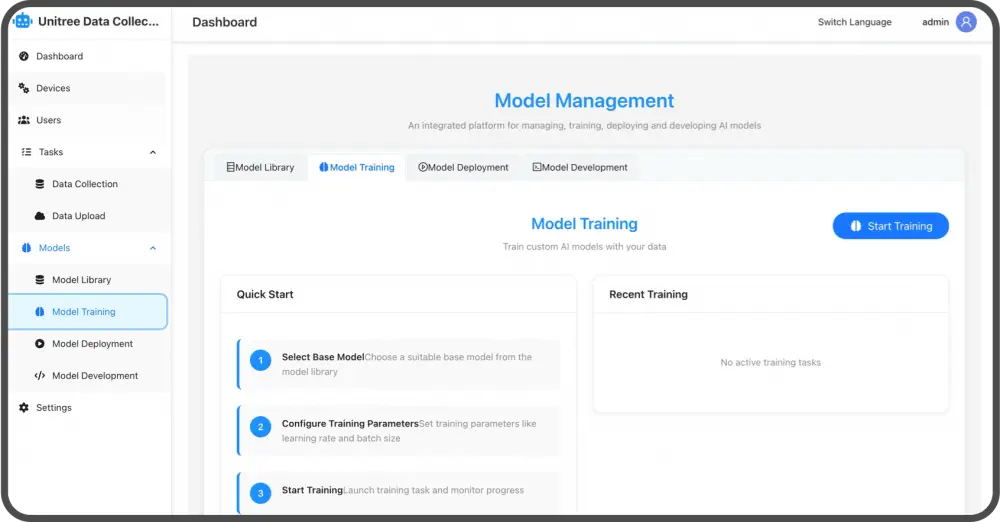
Listo para desplegarse inmediatamente, reduciendo el tiempo de configuración. Inicie el desarrollo con "entrenamiento con un solo clic", use la simulación integrada para una evaluación confiable y transicione sin problemas de algoritmos a máquinas del mundo real.
Construido sobre una pila de entrenamiento distribuido de alto rendimiento, que permite la programación elástica de tareas y la aceleración paralela. Se escala dinámicamente con los recursos disponibles, logrando hasta un 90% de utilización de GPU.
-
1Elegir
Arquitectura de
Modelo -
2Configurar
Entrenamiento -
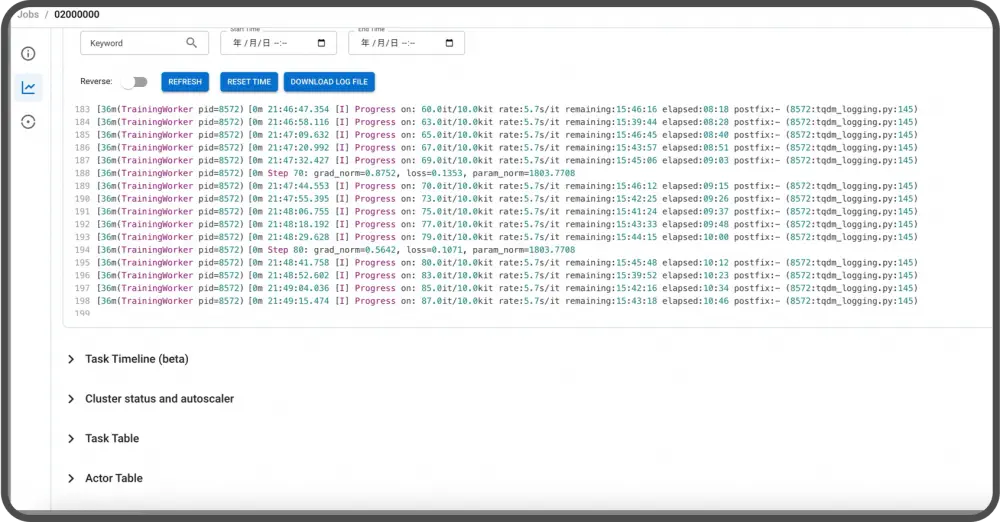
3Monitoreo
de Entrenamiento
en Vivo -
4Ajuste de
Parámetros -
5Realizar Pruebas
de Simulación -
6Exportar y Desplegar
Modelo

Escenario de Aplicación

Servicio

Vida

Comercio

Industria
Un Marco Abierto de Mundo-Modelo-Acción (WMA)
Generación de Acciones Guiada por
Predicción Precisa

Retroalimentación de Alta Fidelidad para
Síntesis de Datos

Incluido
| • | Robot G1-D-U10 (base de ruedas brazo dual) |
| • | Batería inteligente (liberación rápida) 9Ah |
| • | Cargador de unidad principal 54V 5A |
| • | Controlador remoto de mano |
| • | Chasis de base de ruedas con batería incorporada de 30Ah |
| • | Estación de carga del chasis 51V 10A |
| • | Manos hábiles de cinco dedos BrainCo (Edición Táctil Revo 2; incluye cámara RGB) x2 |
El contenido del paquete varía según la configuración.
| • | 1260 × 525 × 570 mm |
| • | 1680 × 525 × 570 mm |
| • | Aprox. 80kg |
Los valores mostrados son las dimensiones generales a la altura mínima y máxima de la columna.
| • | Manos hábiles de cinco dedos BrainCo (Edición Táctil Revo 2) |
| • | Chasis de base de ruedas motorizado (batería incorporada) |
| • | Jetson Orin NX 16GB (100TOPS) |
| • | LiDAR / Cámaras de profundidad / Sensores de colisión (Ultimate) |
[1] La carga máxima del brazo varía considerablemente según las posturas de extensión del brazo.
[2] Para la selección del efector final, por favor contacte a nuestro equipo de ventas.
[3] Para más información, por favor lea el manual de desarrollo secundario.
Estimar envío
ADVERTENCIA: Este producto puede exponerlo a sustancias químicas, incluyendo plomo y compuestos de plomo, que el Estado de California reconoce como causantes de cáncer y defectos de nacimiento u otros daños reproductivos. Para obtener más información, visite: www.P65Warnings.ca.gov.