











Descripción
- Mano de agarre robótica que se adapta a todas las piezas
- 3 dedos articulados y 4 modos de agarre se adaptan a una variedad de tamaños y formas
- Control simple sobre Ethernet / IP, Modbus RTU, DeviceNet o EtherCAT
- Dimensiones: 9 pulgadas en cubos
- Peso: 2.1 kg
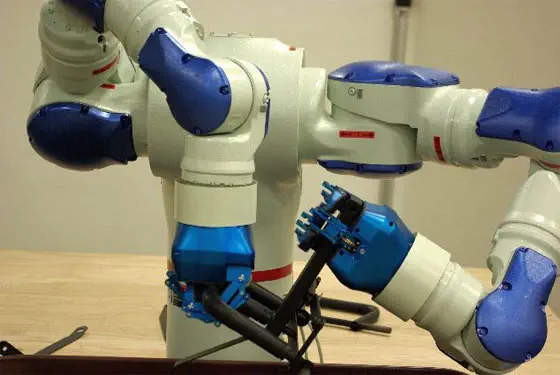
El Robotiq Adaptive Gripper Hand es la primera pinza industrial hábil del mundo que brinda a los robots industriales capacidades "manuales" para mejorar su capacidad de manipular una mayor variedad de piezas, detectar un agarre y controlar la presión en una pieza determinada. Esta pinza está enfocada en aplicaciones que tienen una gran variedad en la manipulación de partes y complejidad en geometría. Está destinado a diversas aplicaciones, como fabricación, teleoperación e investigación.

Cómo funciona
- La pinza se compone de 3 dedos articulados y 4 modos de agarre para agarrar una gran variedad de objetos de diferentes tamaños y formas.
- Envíe comandos simples de abrir-cerrar y permita que la pinza se adapte a cualquier geometría.
- Controla la velocidad y fuerza de cierre. Posible cierre / apertura parcial.
- Recibir retroalimentación de detección de agarre desde la pinza.
- Controlador de pinza incorporado que permite la comunicación a través de Ethernet / IP, Modbus RTU, DeviceNet o EtherCAT. Programe la mano desde el colgante de enseñanza.
- Esta pinza eléctrica viene con el soporte mecánico para su robot o brazo. Tiene dos conectores laterales para una fuente de alimentación de 24V y comunicación.

Aplicaciones de robótica dirigida
Fabricación: trabaje con una herramienta única para recoger, sujetar y colocar piezas de diferentes tamaños y formas. Se usa en aplicaciones tales como ensamblaje, cuidado de máquinas, preparación de kits o posicionamiento de piezas.
Beneficios
Cuando se necesitan manejar 10 o 100 partes diferentes: transferencia de piezas, cuidado de la máquina, soldadura sin plantilla.
- Reprograme en lugar de reorganizar para reducir el costo y el tiempo de configuración
- Una herramienta de robot única para una amplia variedad de piezas, eliminando operaciones manuales y herramientas complejas
- Elimina el cambio de herramienta para reducir el tiempo del ciclo
- Disminuya el tiempo y el costo del diseño personalizado de la pinza
- Sepa si puede sostener la pieza antes de mover el robot para evitar dañar las piezas o el equipo
- Controle la presión para manejar objetos delicados o peligrosos de forma segura
- Teleoperación: para mejorar la destreza y el control intuitivo.
Beneficios
Ya sea una aplicación IED o HAZMAT, está utilizando un robot porque es un entorno peligroso o uno donde el acceso humano es difícil. Ahora puede mejorar las capacidades de su robot con Adaptive Gripper .
- Esta mano de robot se adapta automáticamente a la forma de cualquier objeto porque no quiere que el robot vuelva a modificar la pinza ni cambie la herramienta.
- Proporciona un control intuitivo para que el operador solo tenga que enviar comandos de abrir / cerrar de alto nivel y la pinza hace el resto.
- Destreza mejorada con cuatro modos de agarre, velocidad y fuerza ajustables.
Tres dedos articulados pueden envolverse y sostener objetos peligrosos de forma segura. También puede contener herramientas humanas como un cuchillo o una pala pequeña.

- Investigación: para la manipulación de investigación en entornos no estructurados.
Beneficios
- La pinza se adapta automáticamente para agarrar cualquier cosa con simples comandos de apertura y cierre de alto nivel. Enfóquese en su investigación, deje que la pinza se aferre.
- Robot Hand proporciona información sobre el estado de agarre que se utilizará como disparador en la programación del robot.
- Tres dedos con tres falanges cada uno, cuatro tipos de agarre, velocidad y fuerza ajustables amplían las capacidades de manipulación del robot.
- La pinza también se usa en entornos industriales donde no debe fallar. Se beneficia de la misma fiabilidad.

Integración
- Adaptive Gripper se puede instalar en cualquier robot industrial.
- En la mayoría de los casos, configuramos su Adaptive Gripper para su robot para una integración rápida: viene con la placa frontal o el soporte mecánico, conector (es) y protocolo de comunicación especificados.
- Instala la pinza en su robot con tornillos y conecta los conectores.
- Usando la instrucción colgante y la lista de comandos proporcionada, usted programa la pinza. Para una parte determinada, especifica el tipo de agarre, la velocidad y fuerza de cierre.
- La pinza devuelve información sobre el estado de agarre al controlador.
- Si se necesita una mayor precisión en la colocación de la pieza, la pinza se puede usar junto con la visión o un sensor de torque de fuerza de la muñeca.
- Robotiq Adaptive Gripper
- Cables de alimentación y comunicación
- Adaptador mecánico para su robot elegido
- Dimensiones: 9x9x9 pulgadas
- Peso: 2.1 kg
Archivo zip
archivo PDF
Archivos CAD
Mecánico
- Apertura de la pinza: 1-155 mm
- Peso de la pinza: 2.3kg
- Carga útil de agarre que abarca recomendada: 10 kg
- Carga de agarre de agarre recomendada: 2.5kg
- Fuerza máxima de agarre (agarre con la yema del dedo): 15-60N
- Fuerza máxima de corte: 100N
- Max. velocidad de cierre (agarre de la yema del dedo): 110 mm / seg
- Min. temperatura ambiente: -10 ° C
- Max. temperatura ambiente: 50 ° C
- Repetibilidad de la posición del dedo (agarre de la yema del dedo): 0.05 mm
- Número de dedos: 3
- Número de falanges por dedo: 3
- Número de modos de agarre: 4
- Clase de IP: 31
Controlar
- Opciones de interfaz: Ethernet / IP, Modbus RTU, Modbus TCP / IP, DeviceNet, CANopen o EtherCAT
- Agarrar parámetros programables: control de posición, velocidad y fuerza de cada dedo Control de posición del dedo lateral
- LED de estado: alimentación, comunicación y error
- Retroalimentación: detección de agarre, posición del codificador del motor y corriente del motor
Eléctrico
- Voltaje de suministro nominal: 24VDC
- Potencia de reposo (consumo de energía mínimo): 4.1W
- Potencia máxima (a la fuerza máxima de agarre): 36W
- Corriente de suministro máxima RMS (tensión de alimentación a 24 V): 1.4A
ADVERTENCIA: Este producto puede exponerlo a sustancias químicas, incluyendo plomo y compuestos de plomo, que el Estado de California reconoce como causantes de cáncer y defectos de nacimiento u otros daños reproductivos. Para obtener más información, visite: www.P65Warnings.ca.gov.