- Powered by NVIDIA Jetson Nano and based on ROS
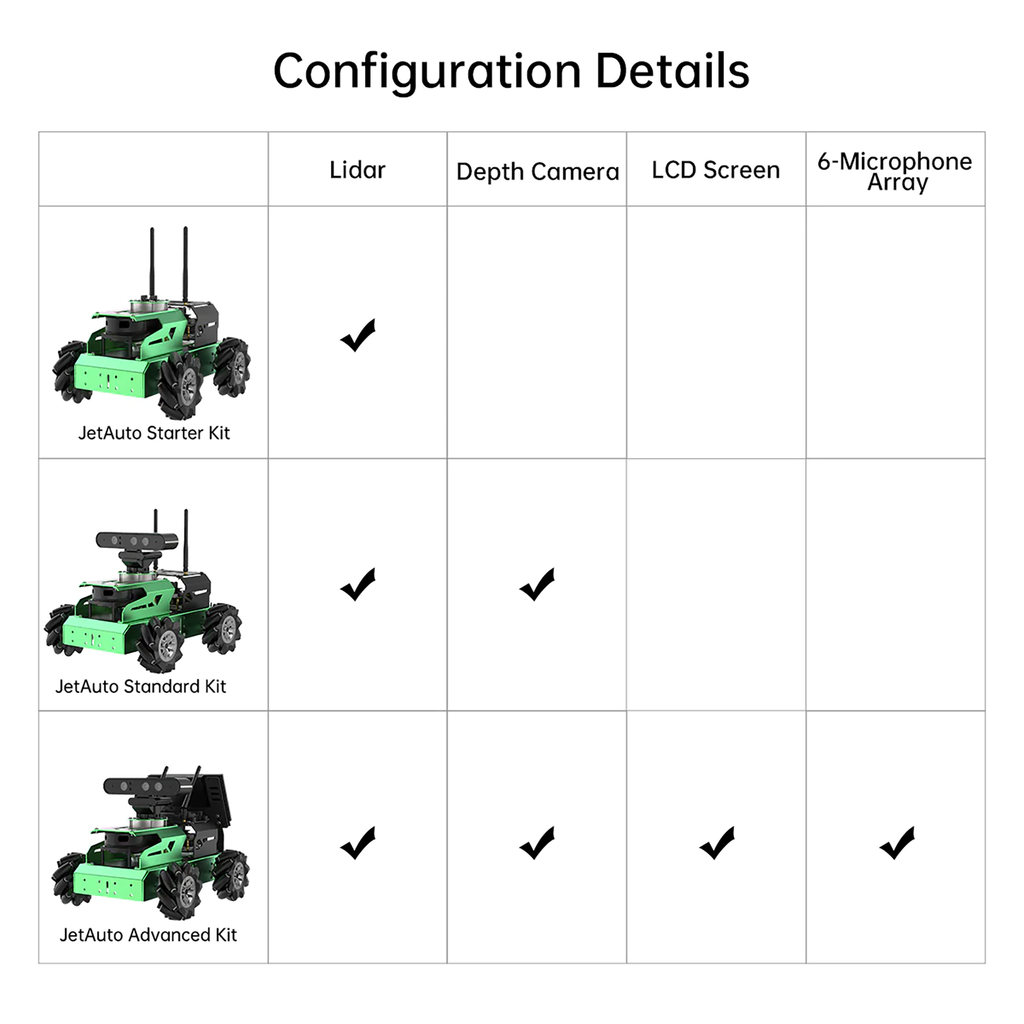
- Supports Lidar for mapping and navigation
- Optional depth camera for 3D vision mapping and navigation
- Optional 7 inch touch screen for parameter monitoring and debugging
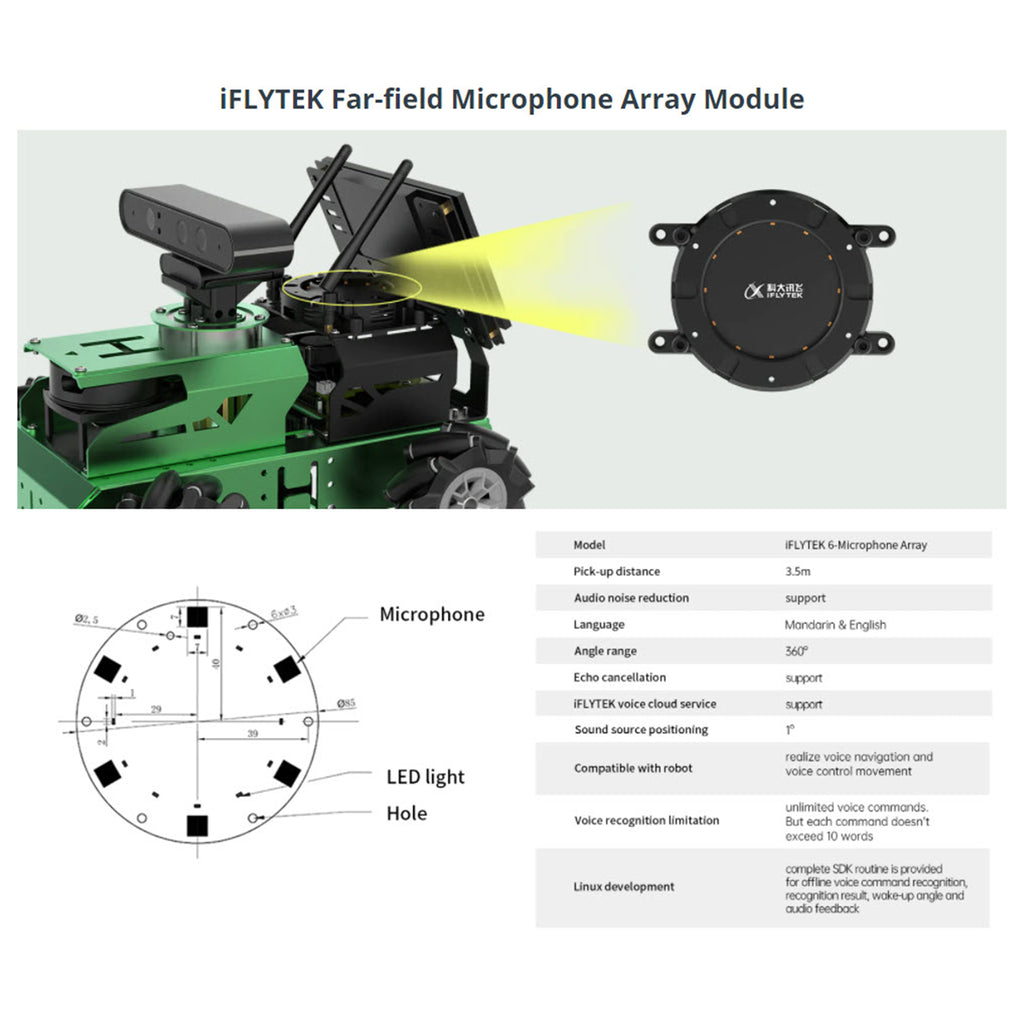
- Optional 6 microphone array for voice interaction
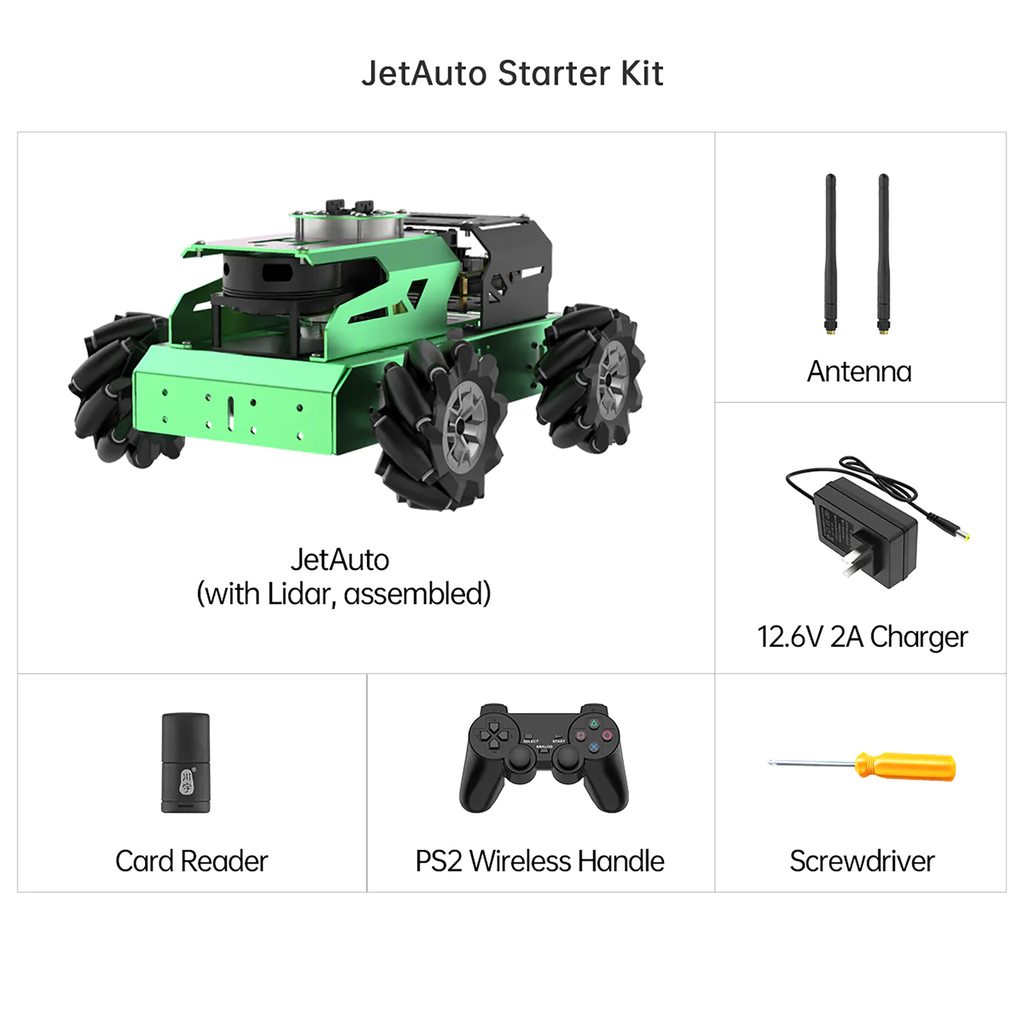
The Hiwonder Jetauto ROS Robot Car w/ Jetson Nano, Lidar Mapping & Navigation Starter Kitis equipped with NVIDIA Jetson Nano, high performance encoder motor, rotatable pan tilt, Lidar, 3D depth camera and 7 inch screen, which opens up a range of functionalities. It is possible to achieve robot motion control, mapping and navigation, path planning, tracking and obstacle avoidance, autonomous driving, human feature recognition, somatosensory interaction and voice interaction.
The combination of hardware makes JetAuto an ideal platform for learning and verifying robotic SLAM functions, as well as getting solutions for ROS development. Comprehensive ROS learning materials and tutorials are provided to help you get started quickly.
NVIDIA Jetson Nano Control System:
The NVIDIA Jetson Nano is able to run mainstream deep learning frameworks, such as TensorFlow, PyTorch, Caffe/ Caffe2, Keras, MXNet, providing powerful computing power for massive AI projects. By utilizing the Jetson Nano, JetAuto can implement image recognition, object detection and positioning, pose estimation, semantics segmentation, intelligent analysis and other powerful functions.
Lidar Functions:
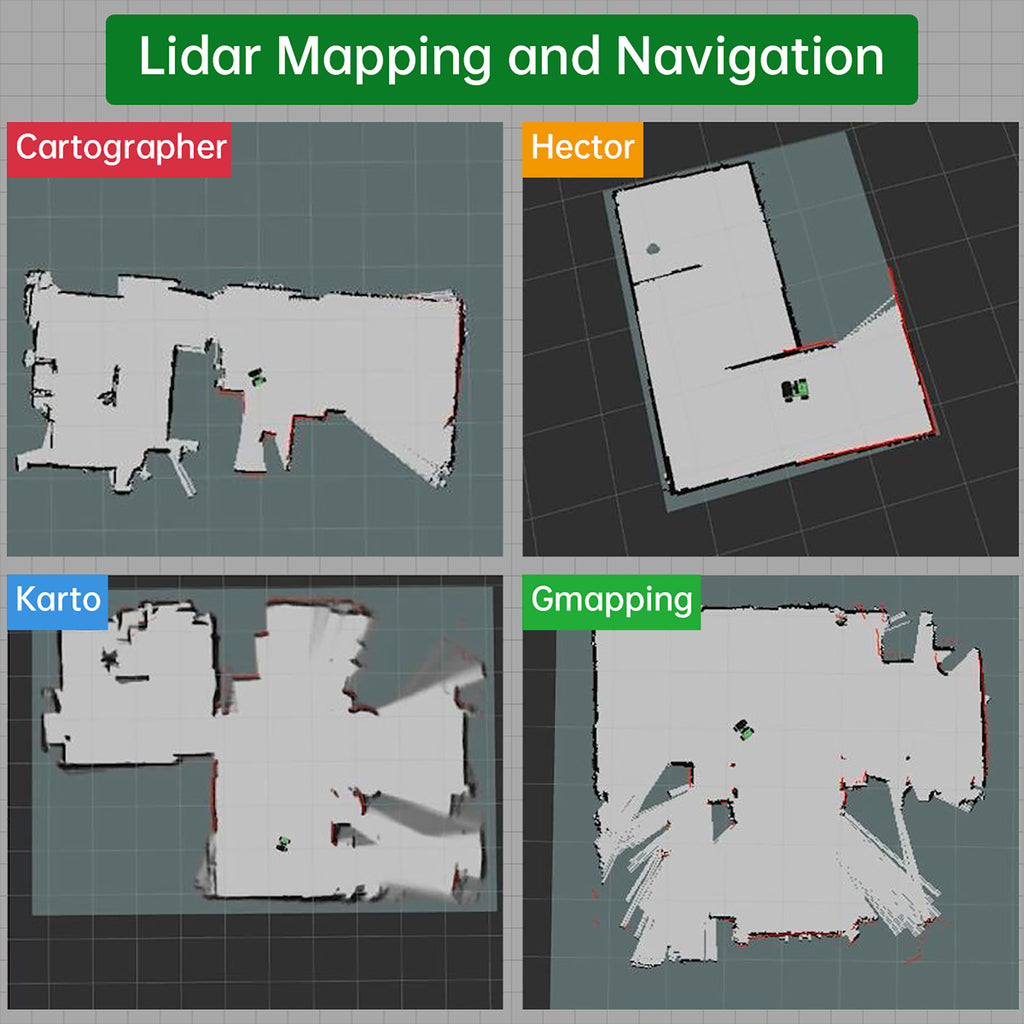
2D Lidar Mapping and Navigation: JetAuto is equipped with a high performance Lidar that supports mapping with diverse algorithms including Gmapping, Hector, Karto and Cartographer. Furthermore, path planning, fixed point navigation as well as obstacle avoidance during navigation can be implemented.
Single Point Navigation, Multi Point Navigation: JetAuto employs Lidar to detect the surroundings in real time to achieve single point navigation as well as multi point navigation.
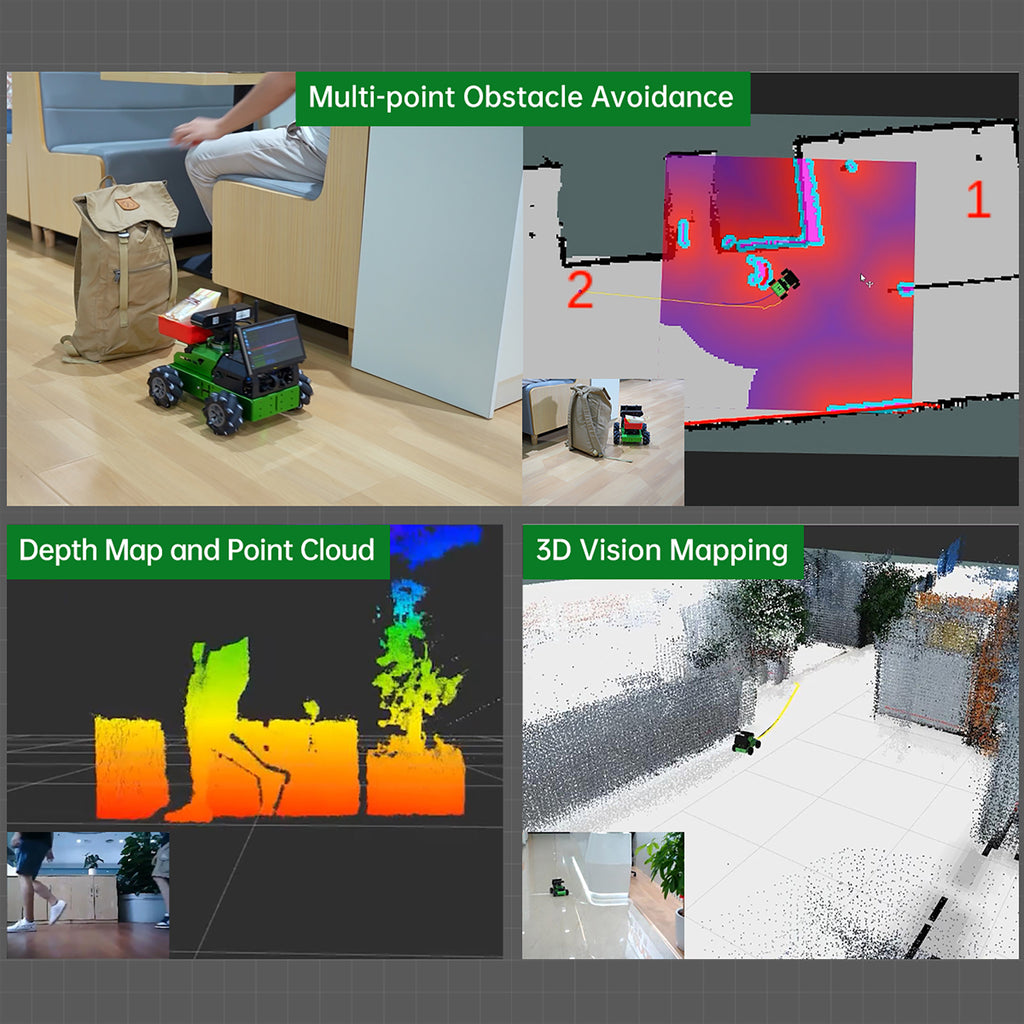
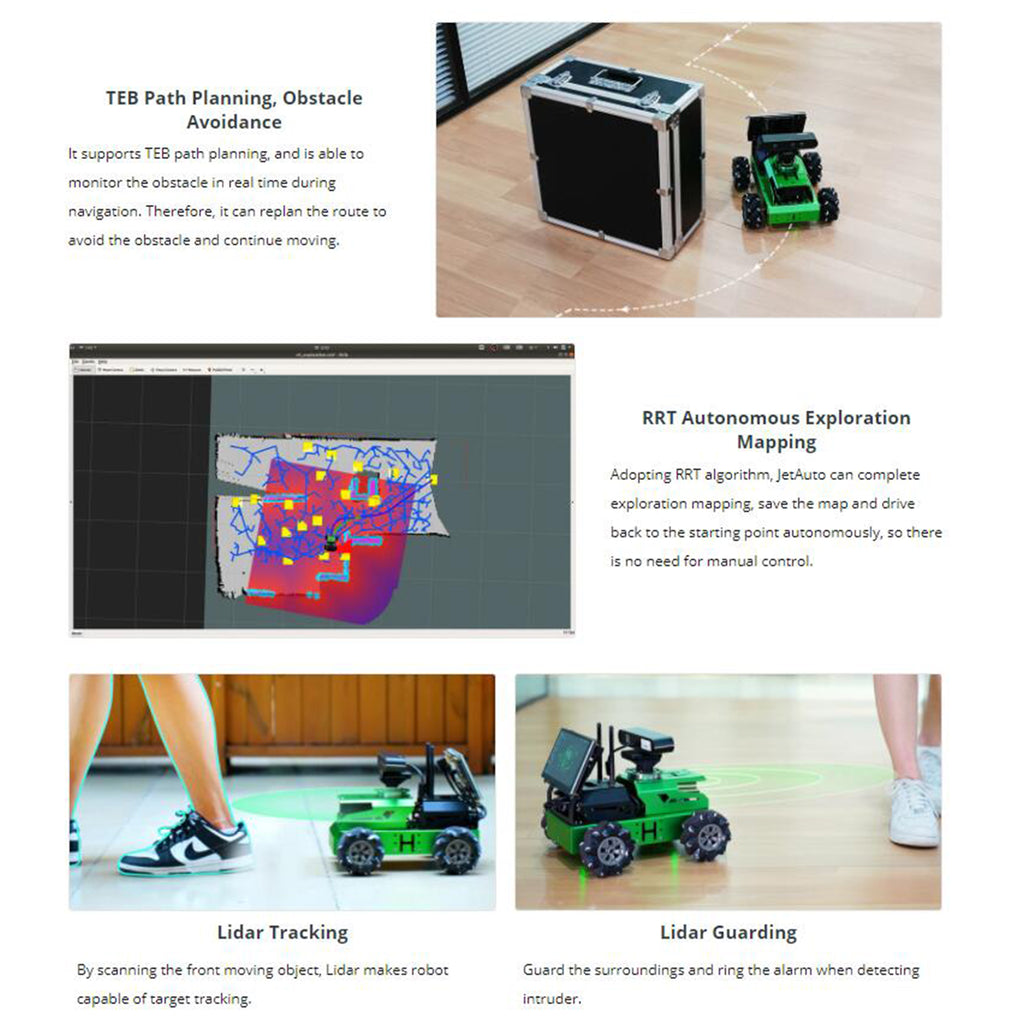
TEB Path Planning, Obstacle Avoidance: It supports TEB path planning, and is able to monitor obstacles in real time during navigation. Therefore, it can replan the route to avoid the obstacle and continue moving.
RRT Autonomous Exploration Mapping: Adopting RRT algorithm, JetAuto can complete exploration mapping, save the map and drive back to the starting point autonomously, without manual control.
Lidar Tracking: By scanning the front moving object, Lidar makes robot capable of target tracking.
Lidar Guarding: Guard the surroundings and sound the alarm when detecting intruder.
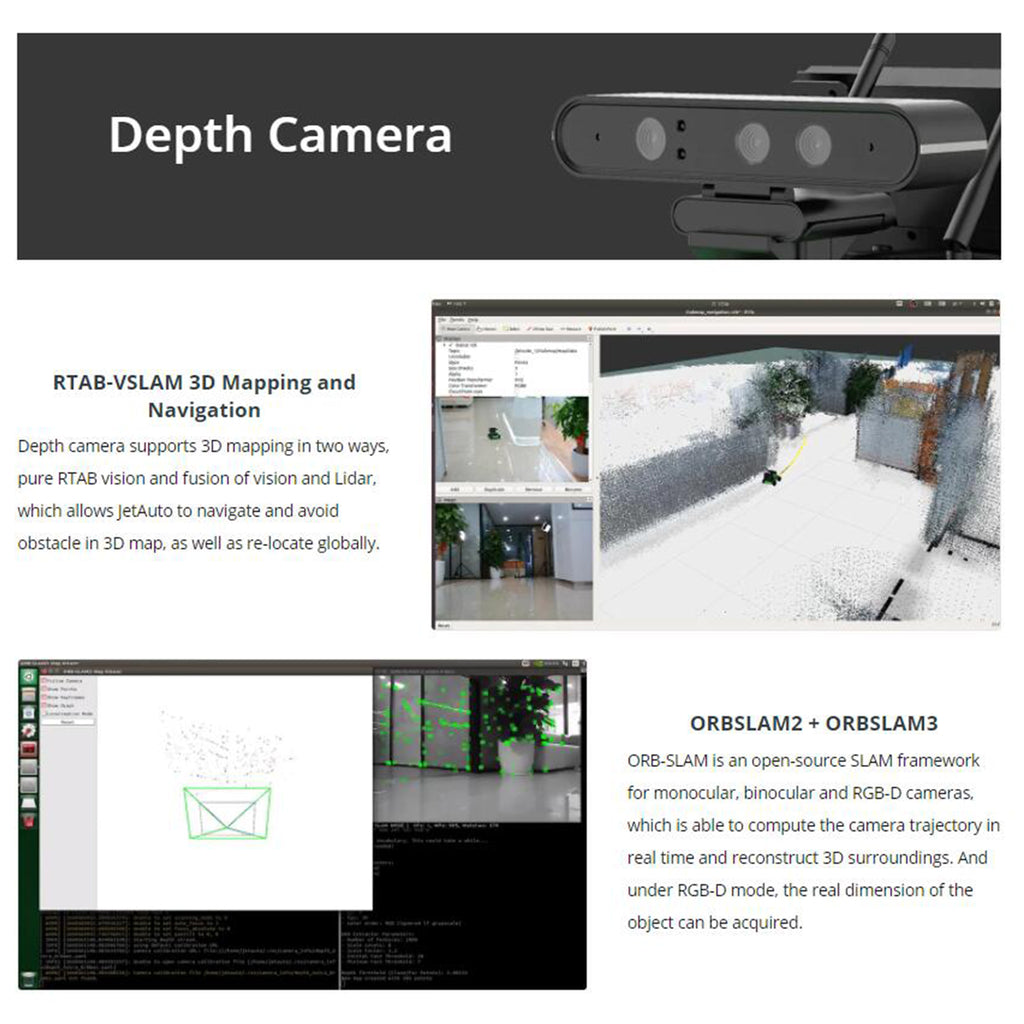
Depth Camera:
RTAB VSLAM 3D Mapping and Navigation: The depth camera supports 3D mapping in two ways, pure RTAB vision and fusion of vision and Lidar, which allows JetAuto to navigate and avoid obstacles in 3D map, as well as relocating globally.
ORBSLAM2 + ORBSLAM3: ORB SLAM is an open source SLAM framework for monocular, binocular and RGB D cameras, which is able to compute the camera trajectory in real time and reconstruct 3D surroundings. And under RGB D mode, the real dimension of the object can be acquired.
Depth Map Data, Point Cloud: Through the corresponding API, JetAuto can get depth map, color image and point cloud of the camera.
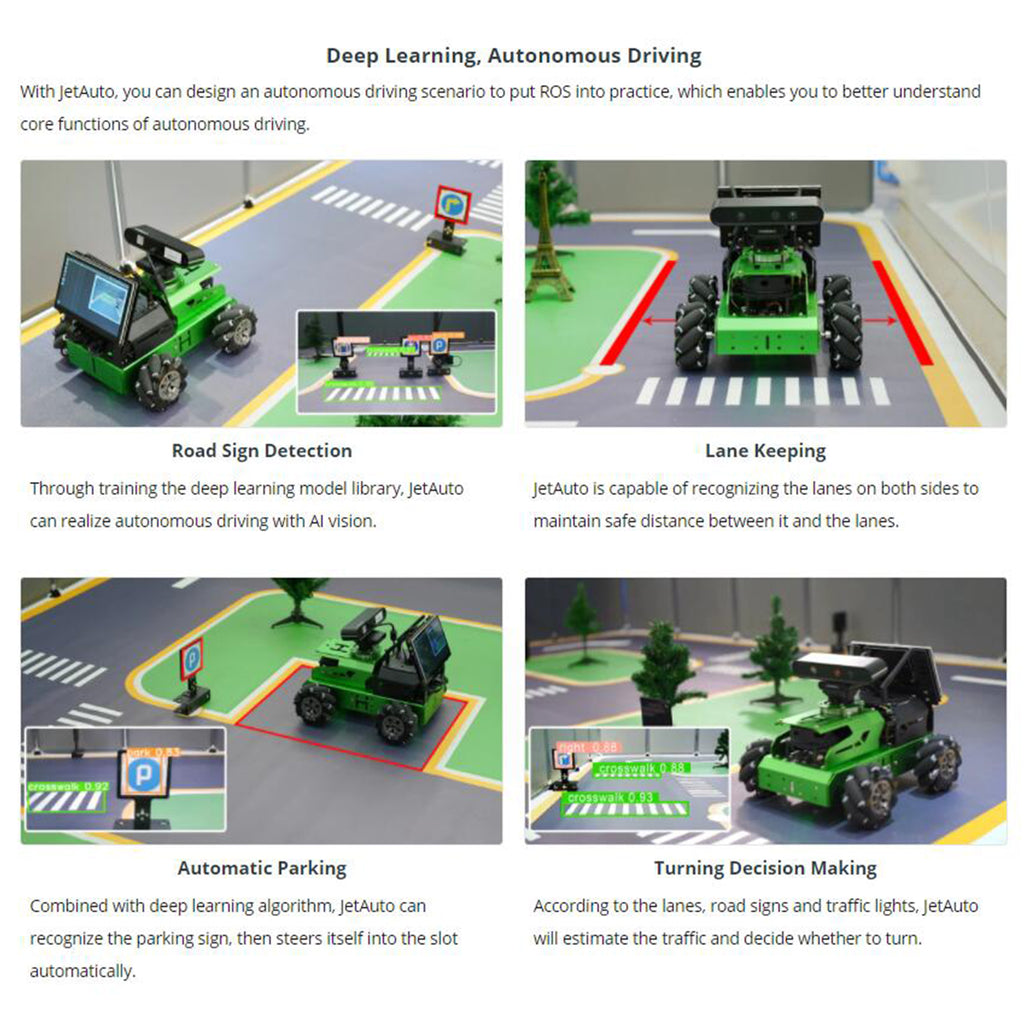
Deep Learning, Autonomous Driving:
With JetAuto, you can design an autonomous driving scenario to put ROS into practice, which enables you to better understand the core functions of autonomous driving.
Road Sign Detection: Through training the deep learning model library, JetAuto can realize autonomous driving with AI vision.
Lane Keeping: JetAuto is capable of recognizing the lanes on both sides to maintain a safe distance between it and the lanes.
Automatic Parking: Combined with deep learning algorithm, JetAuto can recognize the parking sign, then steer itself into the slot automatically.
Turning Decision Making: According to the lanes, road signs and traffic lights, JetAuto will estimate the traffic and decide whether to turn.
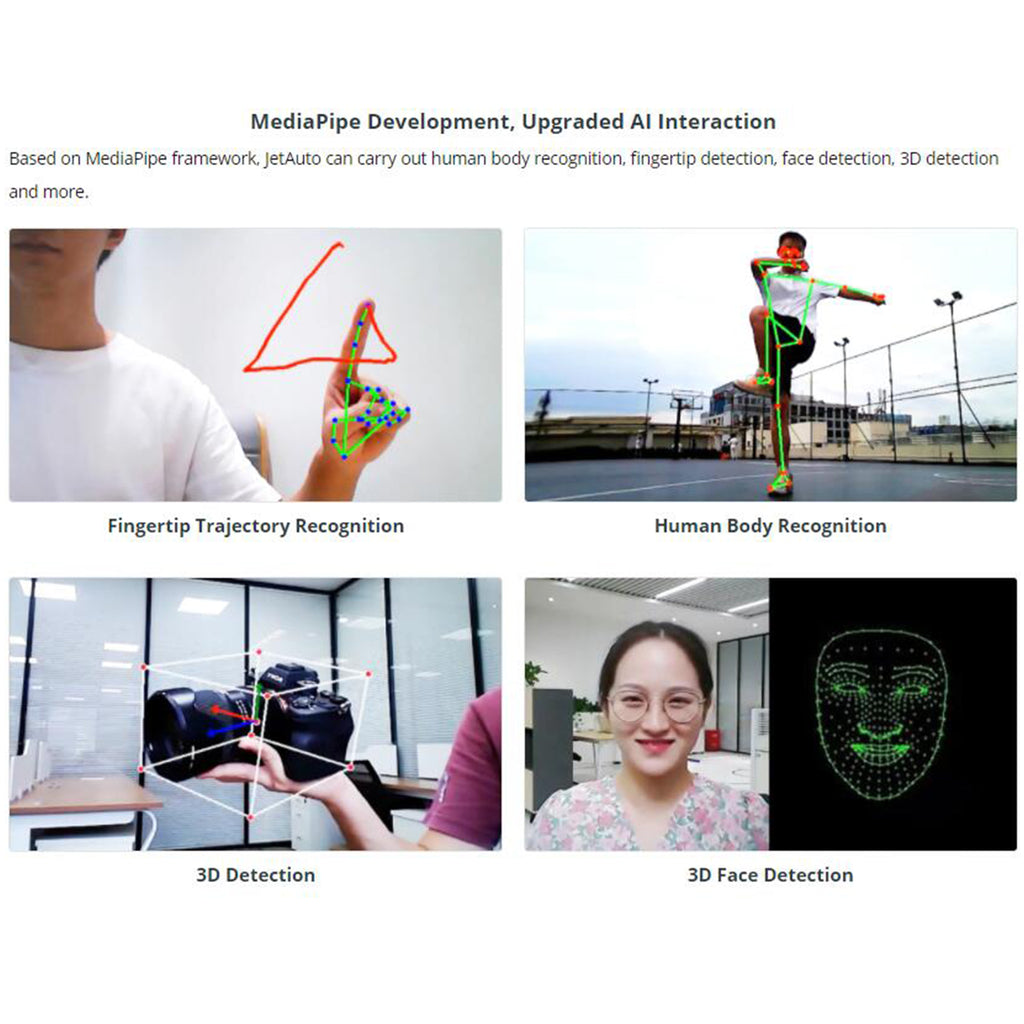
MediaPipe Development, Upgraded AI Interaction:
Based on MediaPipe framework, JetAuto can carry out human body recognition, fingertip detection, face detection, 3D detection and more.
1) Fingertip Trajectory Recognition
2) Human Body Recognition
3) 3D Detection
4) 3D Face Detection
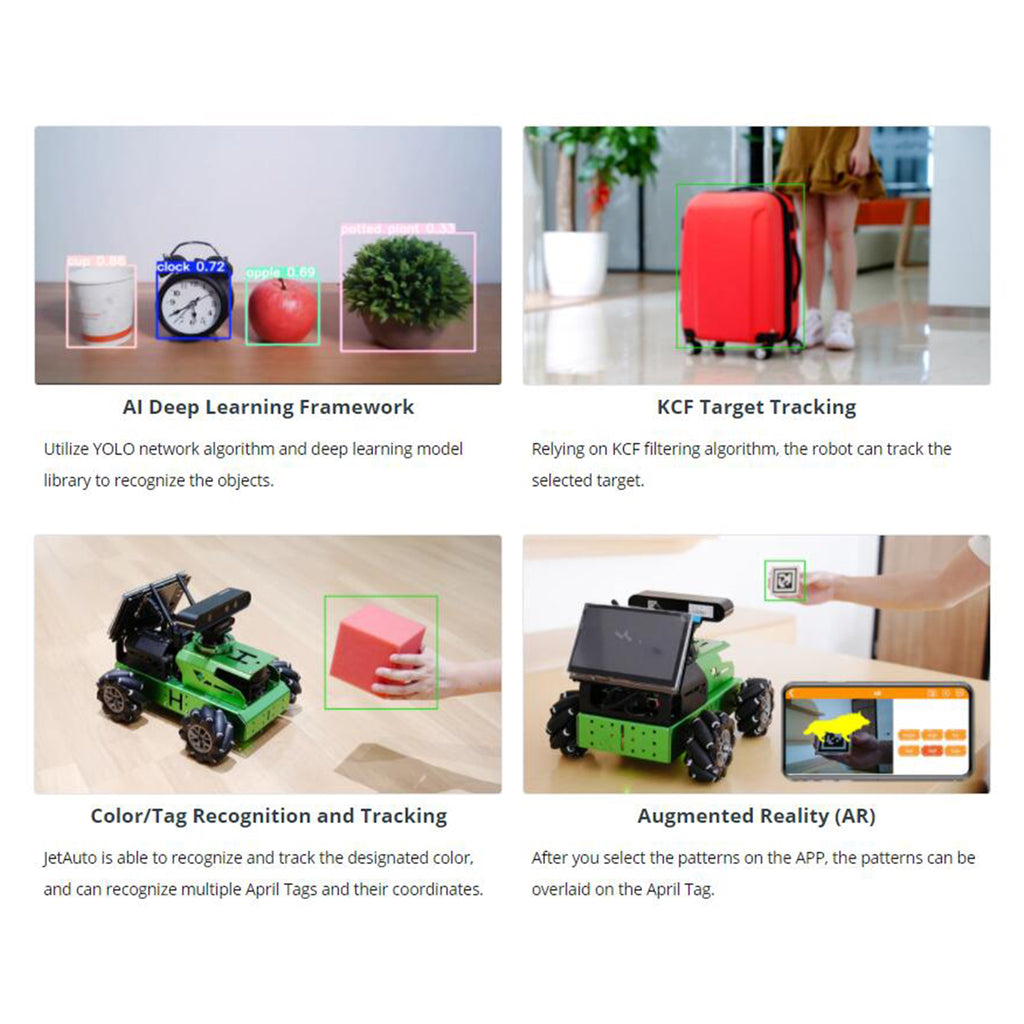
AI Deep Learning Framework: Utilize YOLO network algorithm and deep learning model library to recognize the objects.
KCF Target Tracking: Relying on KCF filtering algorithm, the robot can track the selected target.
Color/Tag Recognition and Tracking: JetAuto is able to recognize and track the designated color, and can recognize multiple April Tags and their coordinates.
Augmented Reality (AR): After you select the patterns on the APP, the patterns can be overlaid on the April Tag.
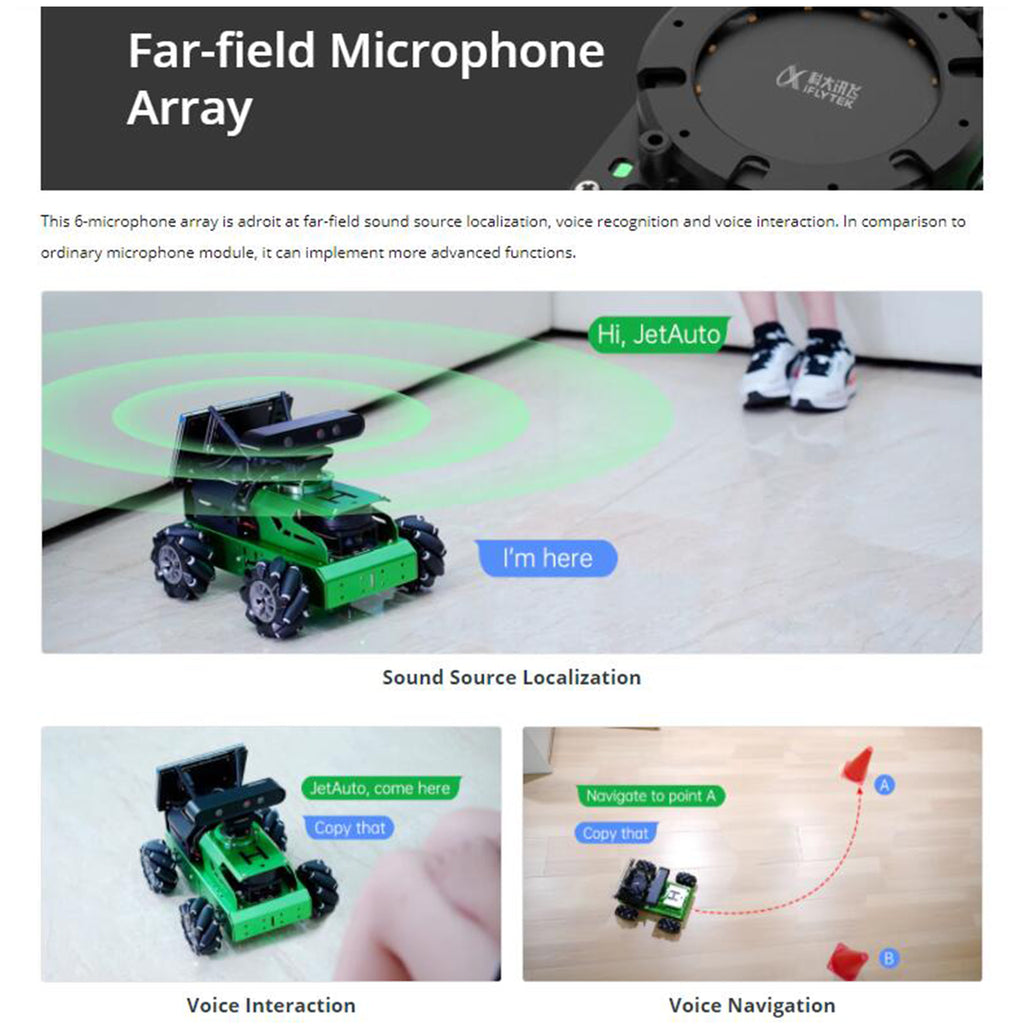
Far Field Microphone Array:
This 6 microphone array is adept at far field sound source localization, voice recognition and voice interaction. In comparison to ordinary microphone modules, it can implement more advanced functions.
1) Sound Source Localization
2) Voice Interaction
3) Voice Navigation
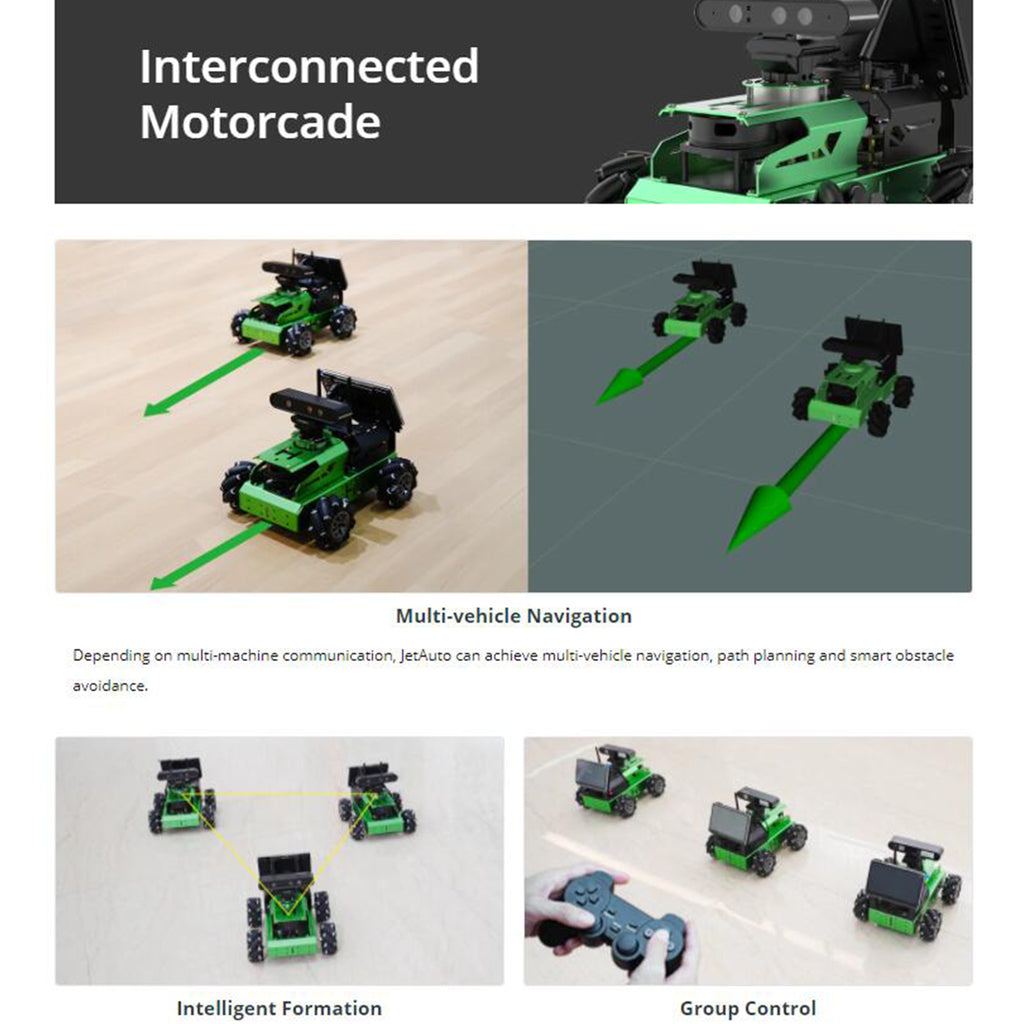
Interconnected Motorcade:
Depending on multi machine communication, JetAuto can achieve multi vehicle navigation, path planning and smart obstacle avoidance.
Intelligent Formation: A batch of JetAuto cars can maintain the formation, including horizontal line, vertical line and triangle, during movement.
Group Control: A group of JetAuto can be controlled by only one wireless handle to perform actions uniformly and simultaneously.
ROS Robot Operating System:
ROS is an open source meta operating system for robots. It provides some basic services, such as hardware abstraction, low level device control, implementation of commonly used functionality, message passing between processes, and package management. It also offers the tools and library functions needed to obtain, compile, write, and run code across computers. It is designed to provide code reuse support for robotics research and development.
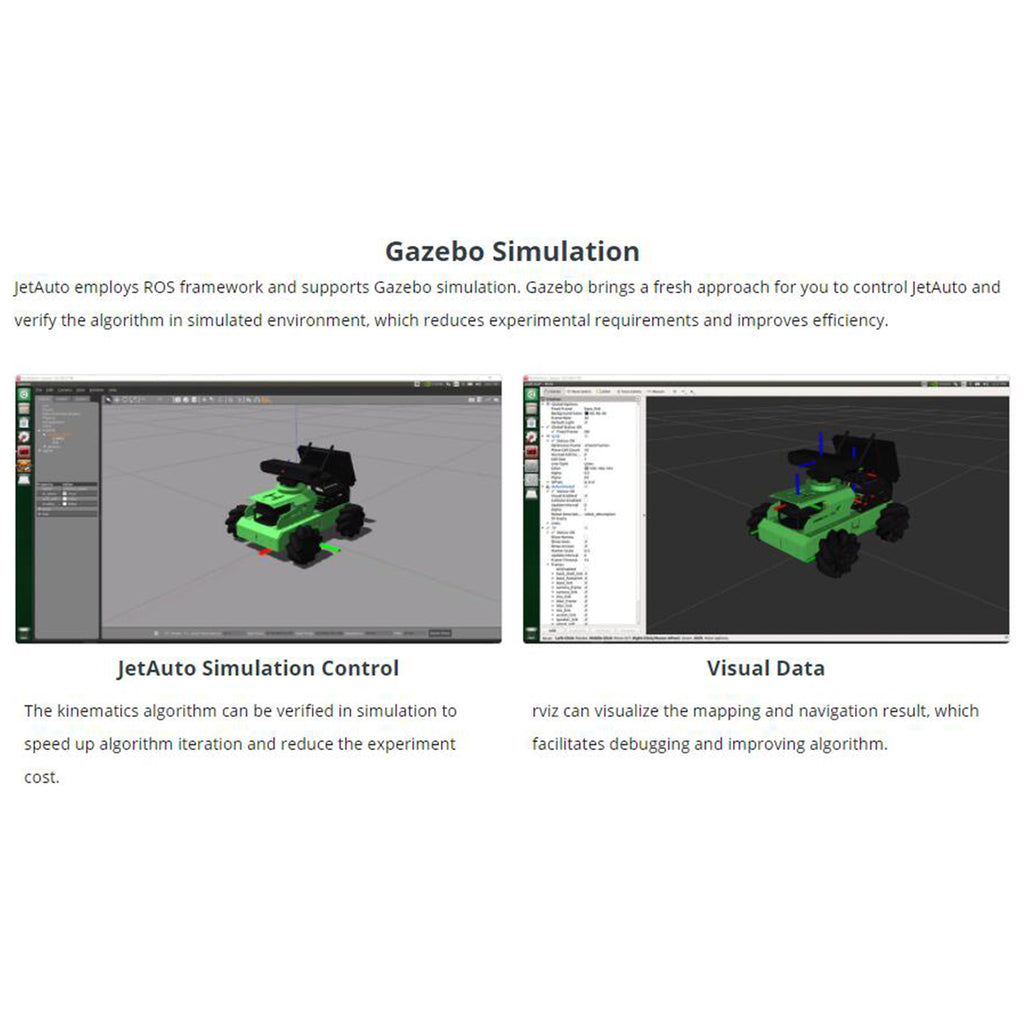
Gazebo Simulation:
JetAuto employs ROS framework and supports Gazebo simulation. Gazebo provides a novel approach for controlling JetAuto and verifying the algorithm in a simulated environment, which reduces experimental requirements and improves efficiency.
JetAuto Simulation Control: The kinematics algorithm can be verified in simulation to speed up algorithm iteration and reduce the experiment cost.
Visual Data: rviz can visualize the mapping and navigation result, which facilitates debugging and improving the algorithm.
Various Control Methods:
1) WonderAi APP
2) Map Nav APP (Android Only)
3) Wireless Handle.